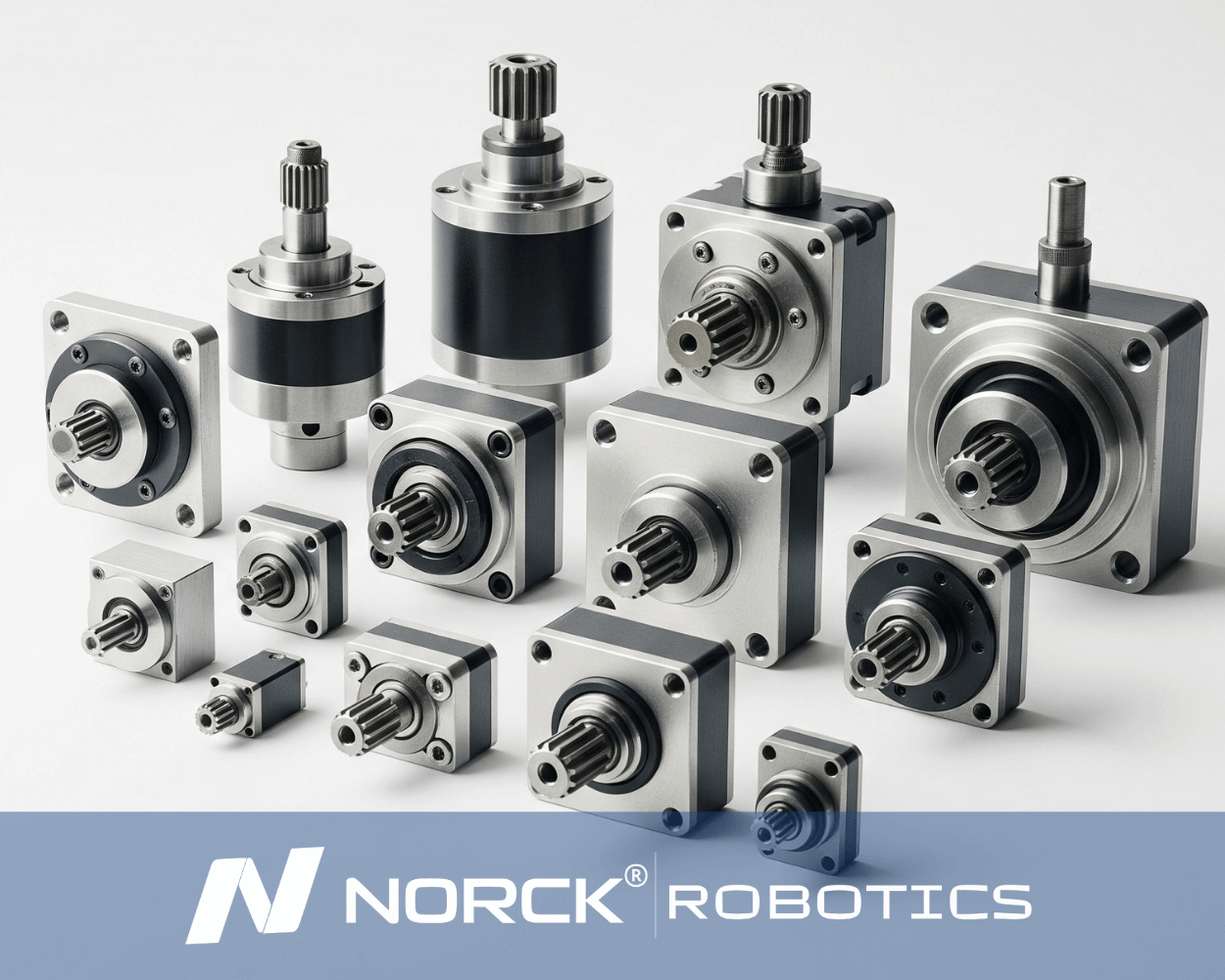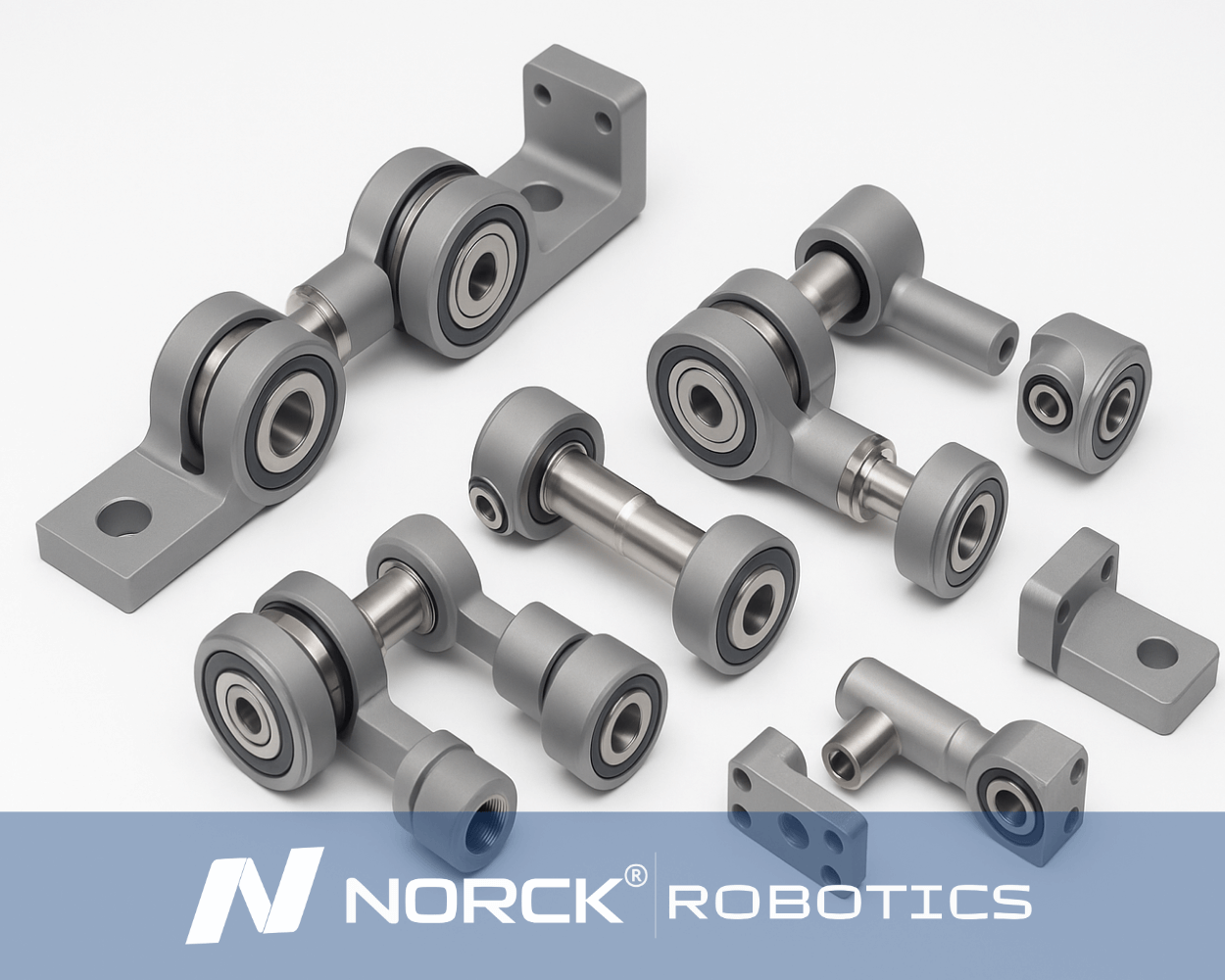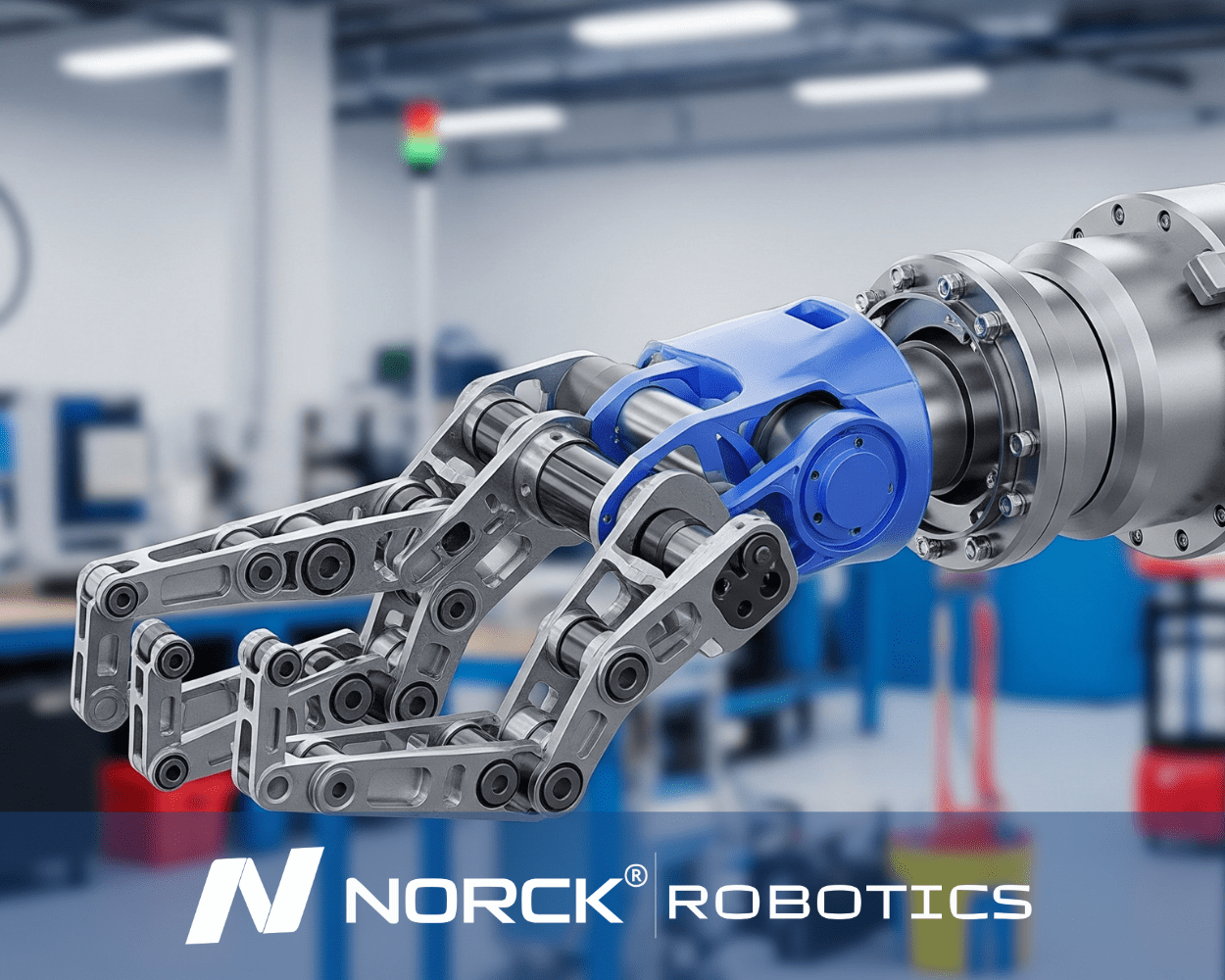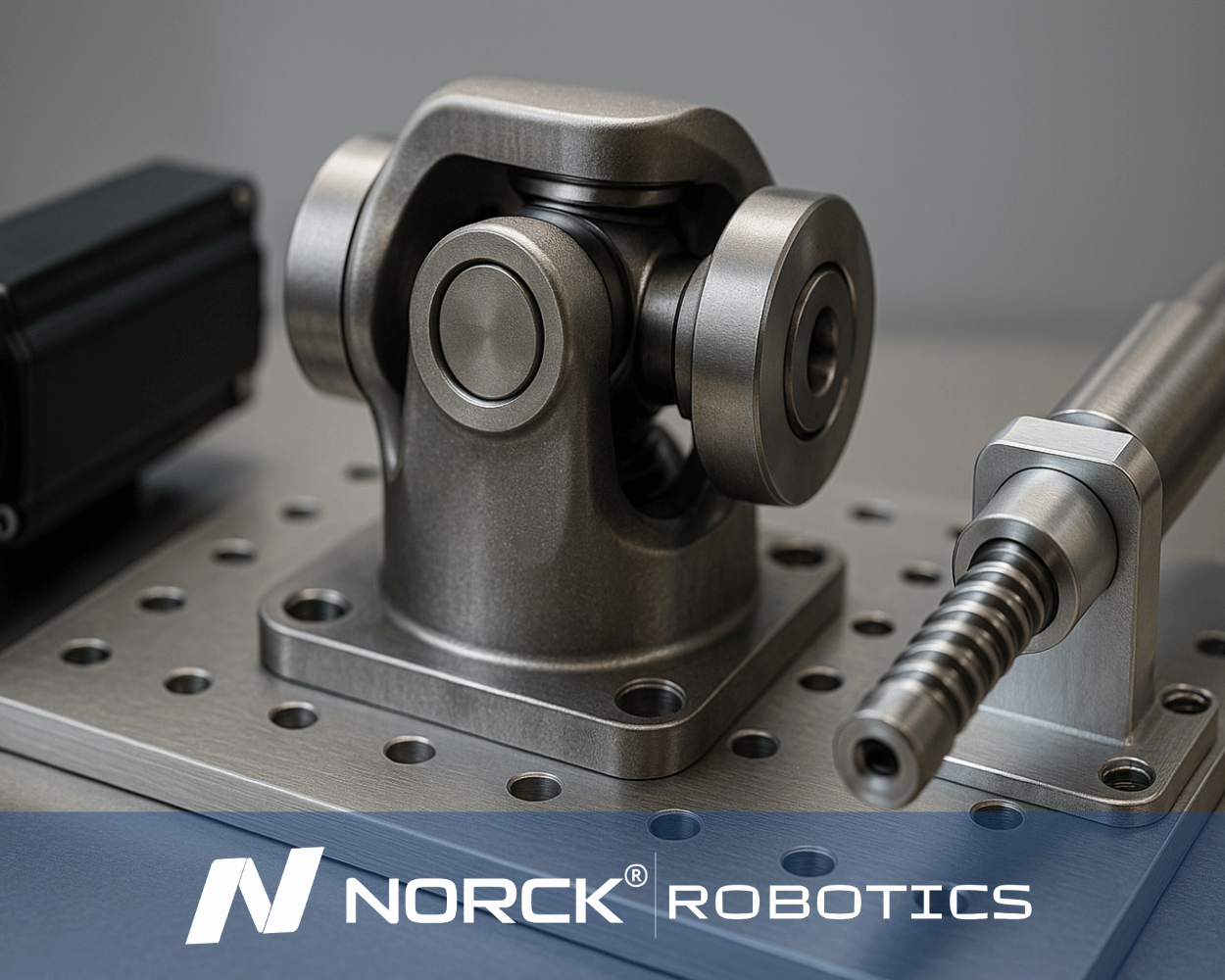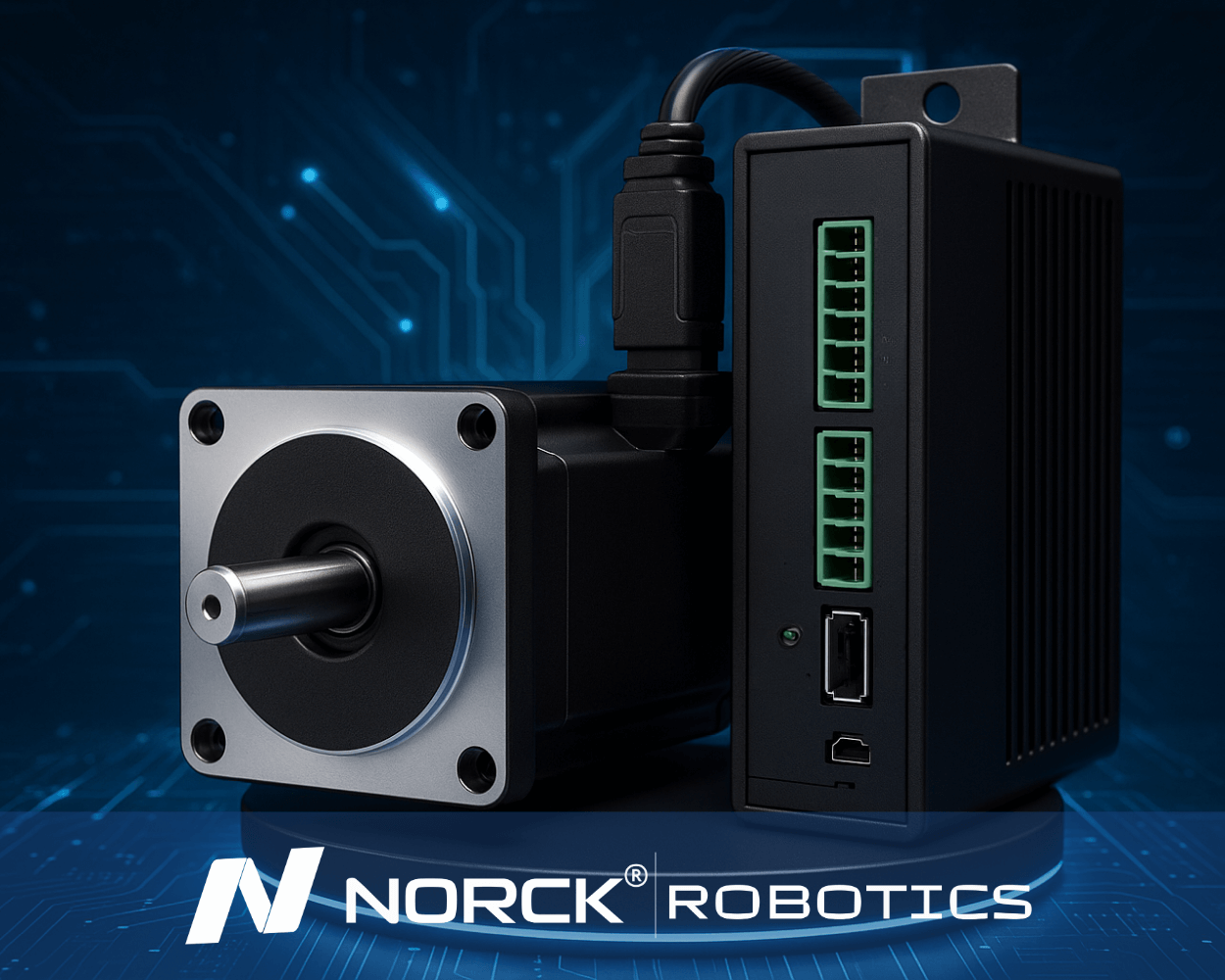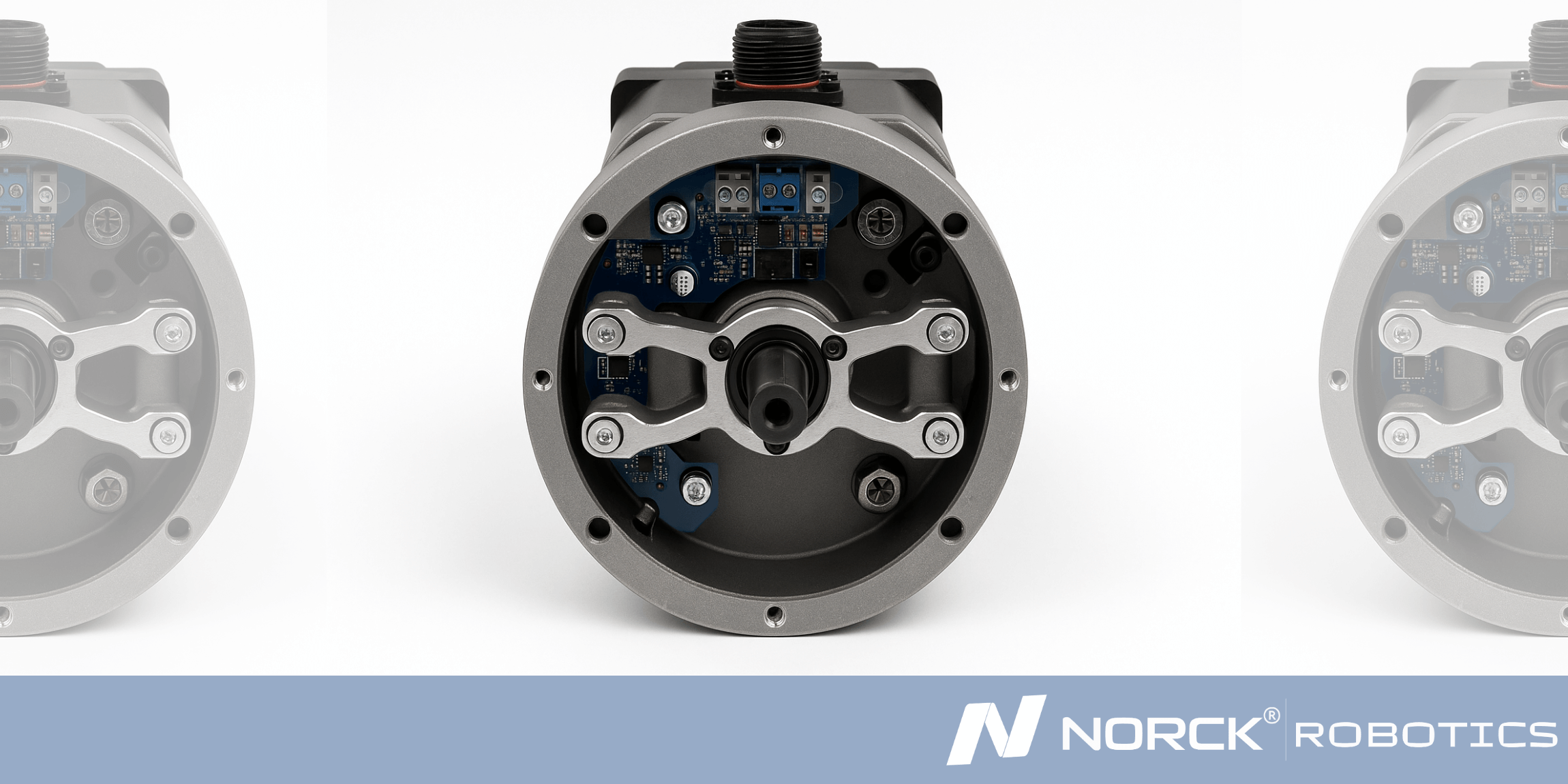

Usually, Universal Robotic Joints consist of a two-axis revolver mechanism, allowing for a combination of smooth rotating about multiple axes beyond those that can be had building two-axes-of-motion robots and motion platforms. The joints are equipped with high precision bearings and either a reduction mechanism like a gearbox to achieve accurate and stable motion. Universal joints are used mostly in industrial robotics while welding and assembling; they need to be very robust, repeatable, and able to withstand long hours of continuous operation. Universal robotic joints provide a base layer of flexibility into a highly articulated and adaptive mechanism.
Ready to automate your future? Get a quote from Norck Robotics now!
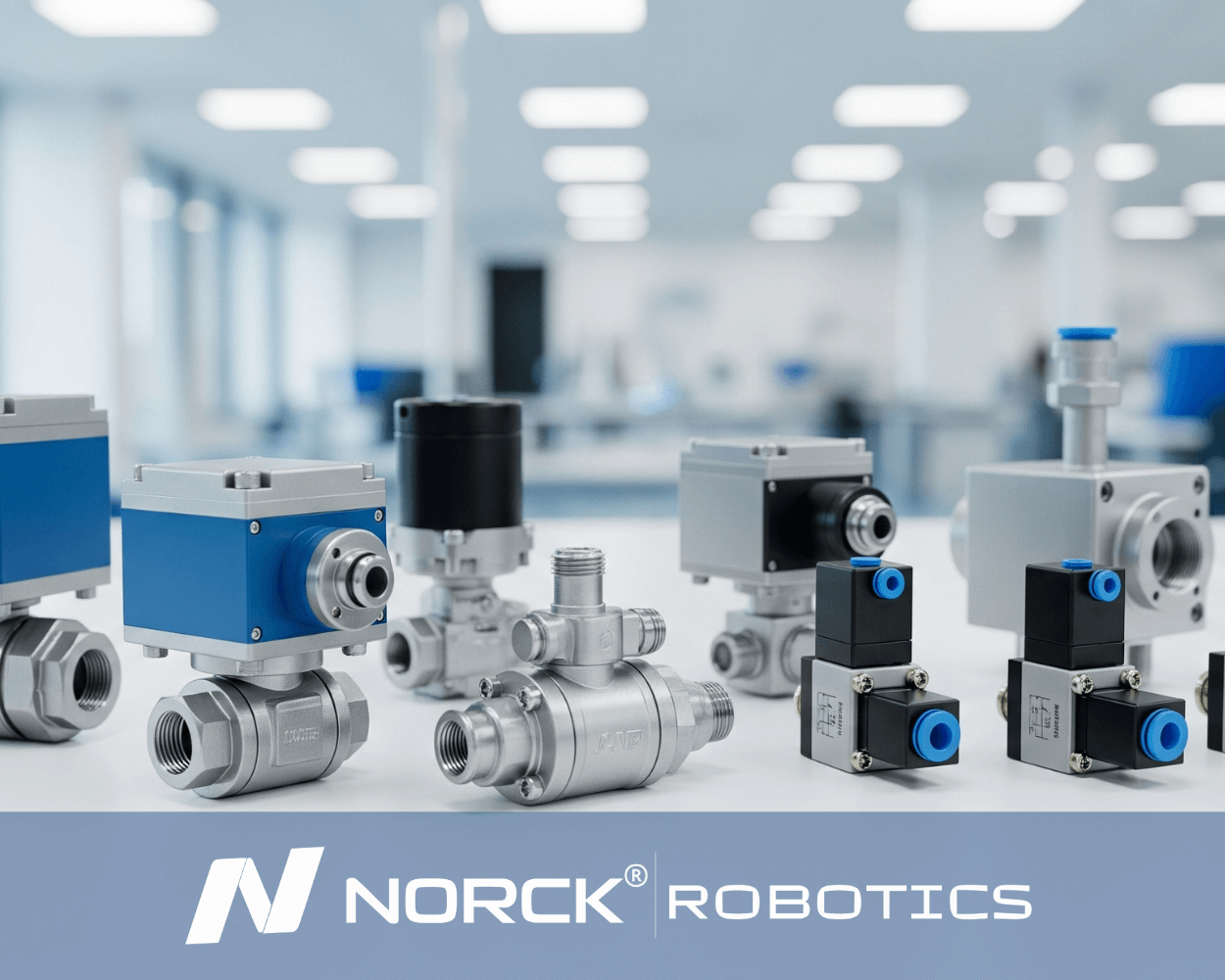
Norck Robotics specializes in providing unique robotic automation and engineering solutions designed to meet the specific operational needs of each client. Our expertise covers a wide range of industries and applications.
Norck Robotics delivers turnkey robotic automation and engineering solutions tailored to your specific needs across various industries.

Whether you need a single robotic cell prototype or full-scale factory automation, Norck Robotics engineers are ready to collaborate with you to bring your concept to life.
Norck Robotics engineers analyze your existing processes to provide feedback that enhances efficiency, cost-effectiveness, and productivity for robotic integration.

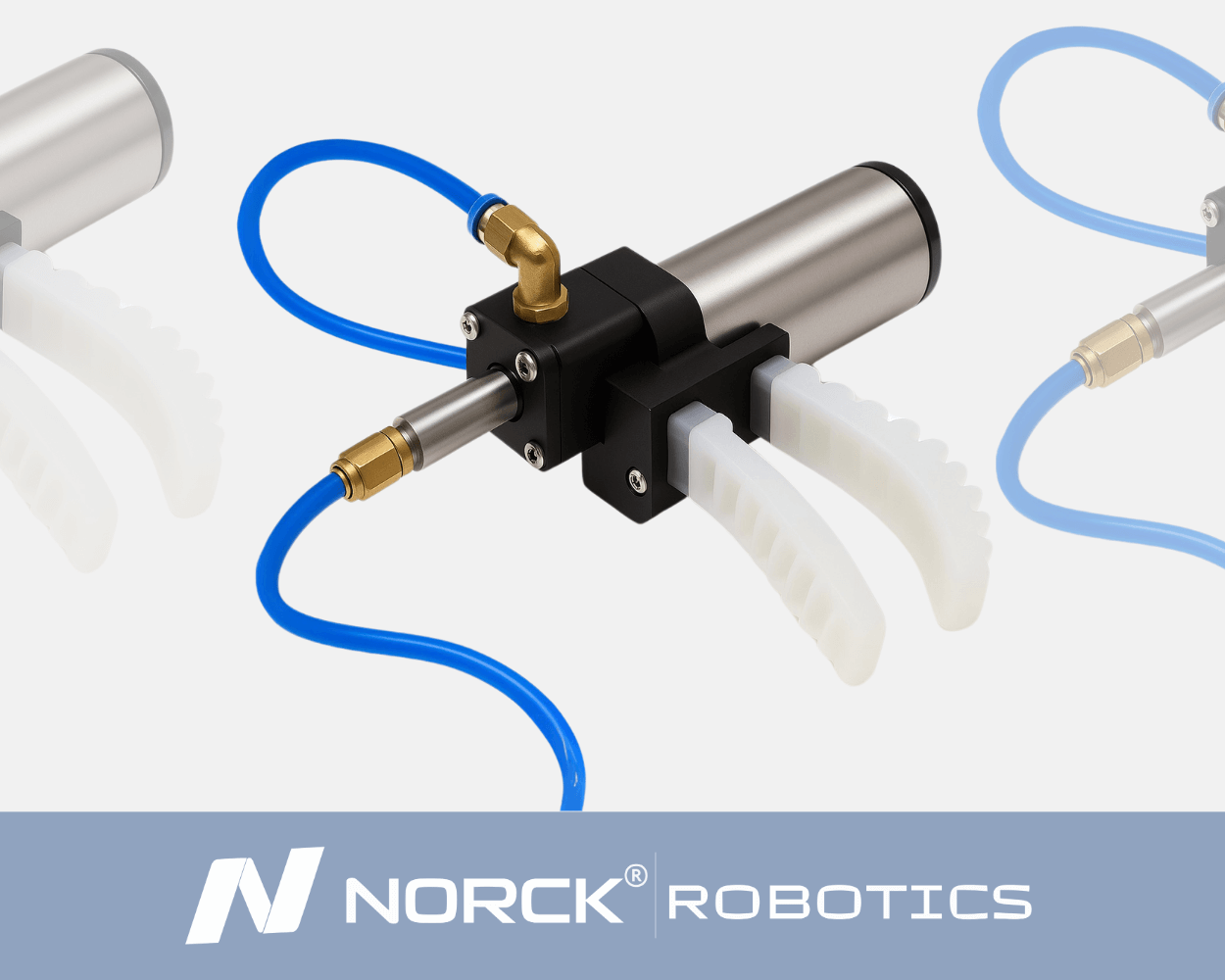
Universal Robotic Joints are essentially mechanical components designed to provide rotational motion in multi-directions, most classically around two axes. They act as the critical building blocks of both multi-DOF robotic arms and platforms, providing construction flexibility and precision.
The primary function of Universal Robotic Joints is to import articulated motion between connected segments to perform complex operations such as welding, assembly, or inspection.
By allowing these movements, they ensure smooth and controlled motions in industrial robots equipped with bearings and gear mechanisms ensuring stability and repeatability.
Commonly, robotic universal joints employ two axes of motion and are therefore known as two degrees of freedom. A simplified explanation of the two axes is given below:
It has to do with rotation of the joint left and right along the horizontal axis for the robotic arm much like the head turning sideways. It helps the robot to position itself around an object.
The arm tilts backward and forward as if nodding. This makes the arm reach up or down to interact with items at a certain height or angle.
Combining these two movements, the robot has a flexible range to actually move and precisely position tools or grippers.

In addition to its own expert engineering team, Norck Robotics provides access to a network of hundreds of top-tier system integrators, robot manufacturers, and component suppliers across the United States, Germany, and Europe.

Working with Norck Robotics reduces dependency on manual labor, increases production consistency, and secures your operations against unforeseen disruptions, quality issues, and fluctuations. This enhances your company's supply chain resilience.
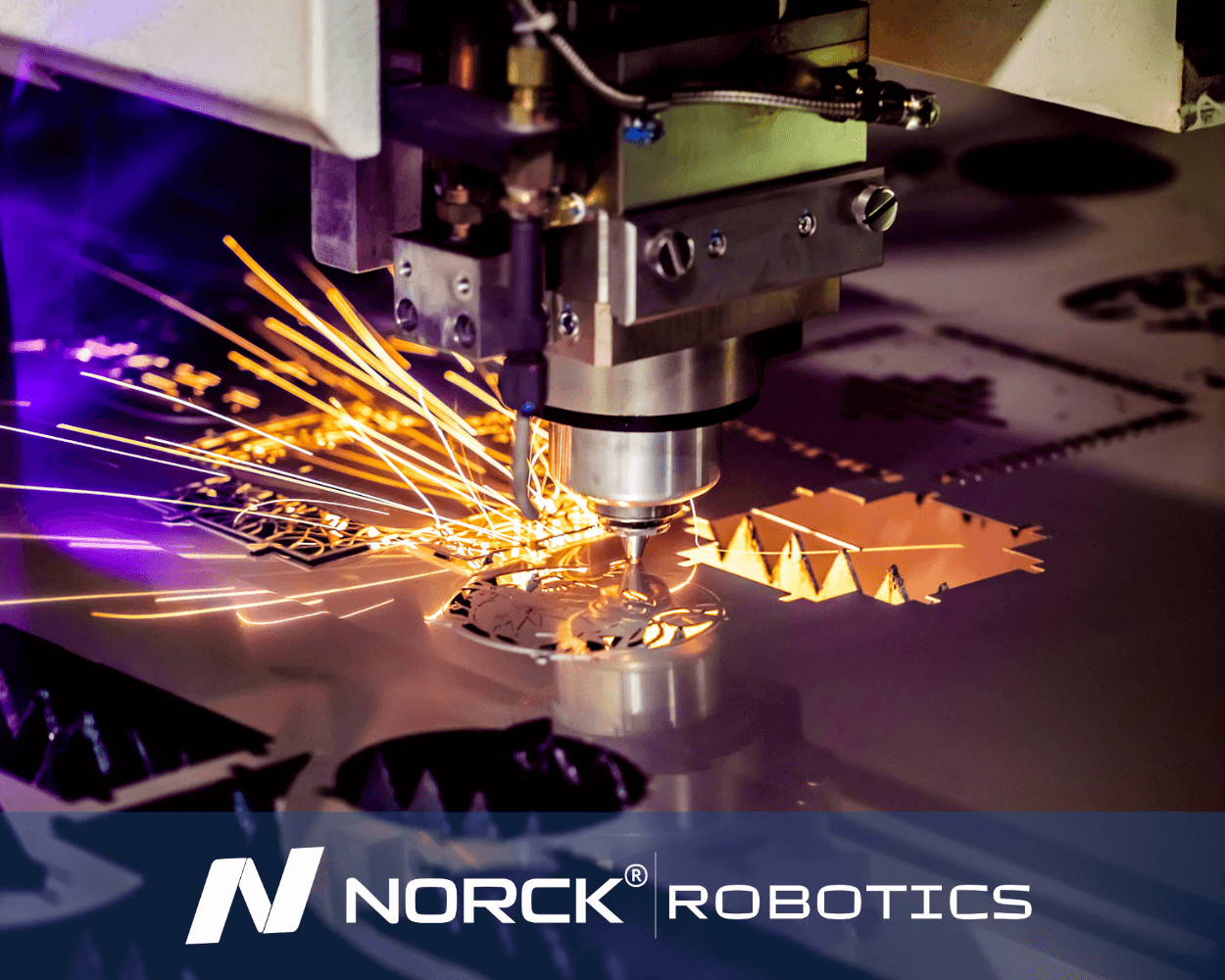
Norck Robotics advances digital automation by developing custom-designed robot grippers, advanced vision systems, and innovative simulation software. With an AI-driven, data-centric approach, it enables smarter system design, optimal performance, and predictive maintenance solutions.
Norck Robotics encourages its partners to be carbon-neutral by reducing energy consumption and material waste through the efficiency of robotic automation, and prioritizes environmentally conscious suppliers.
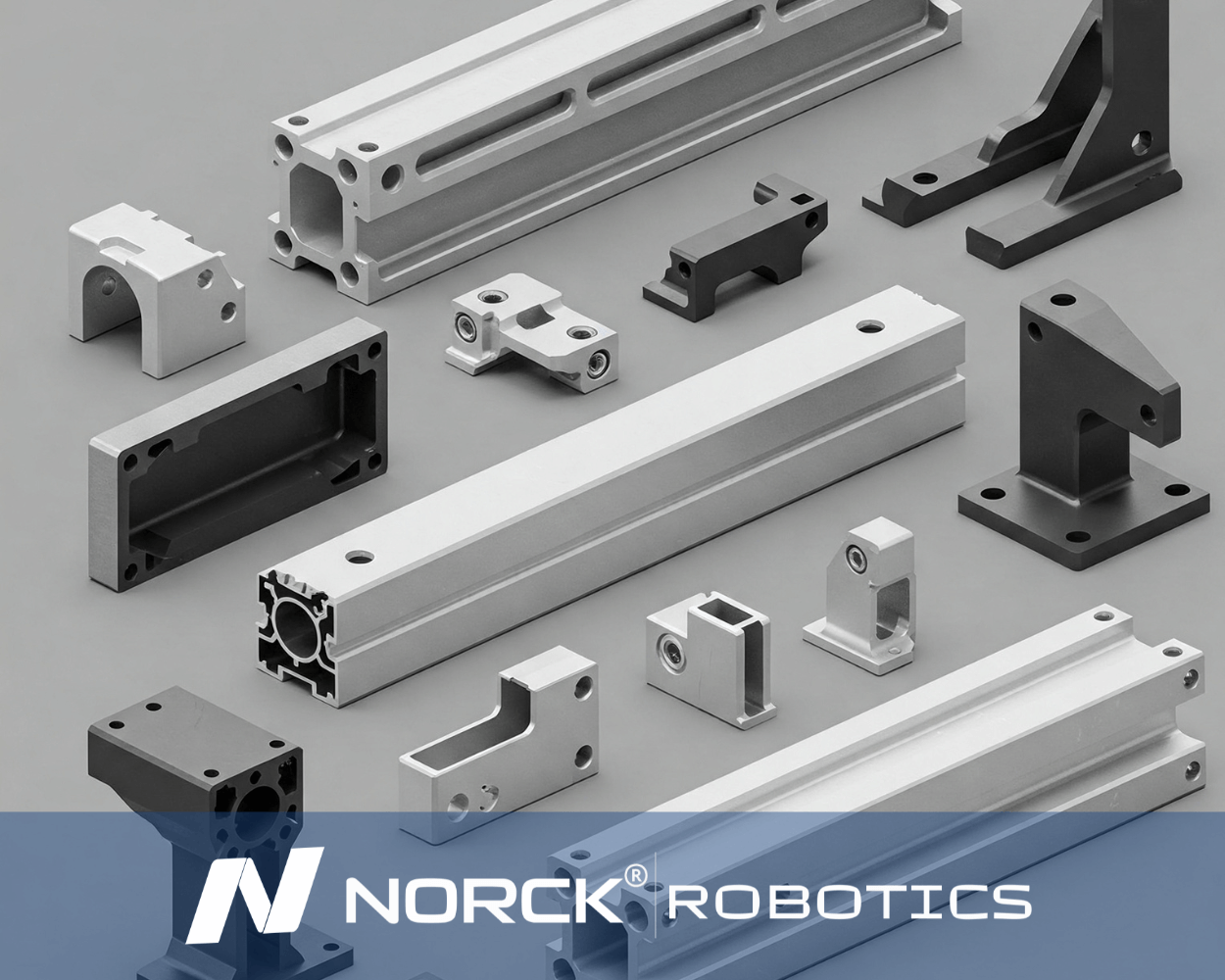
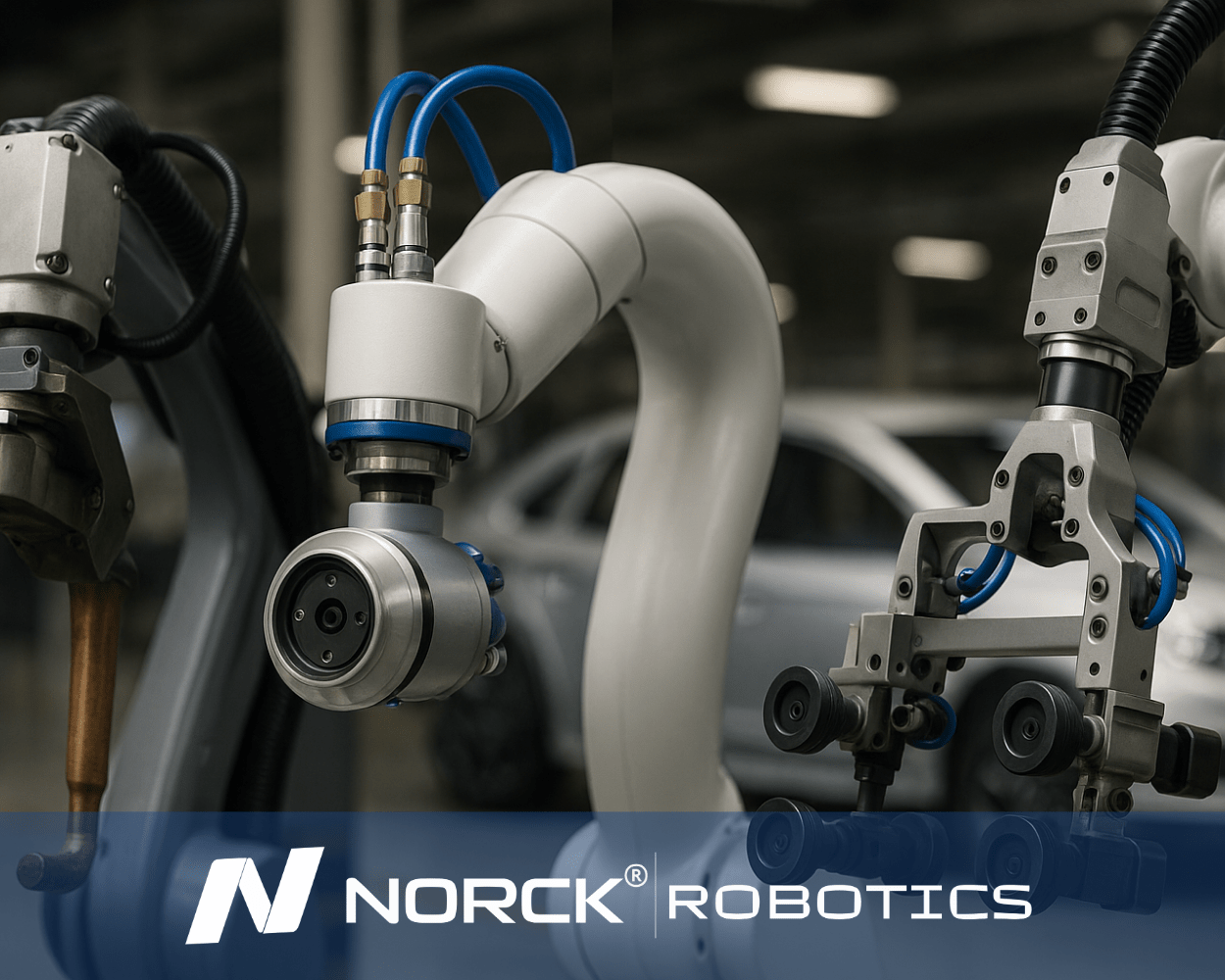
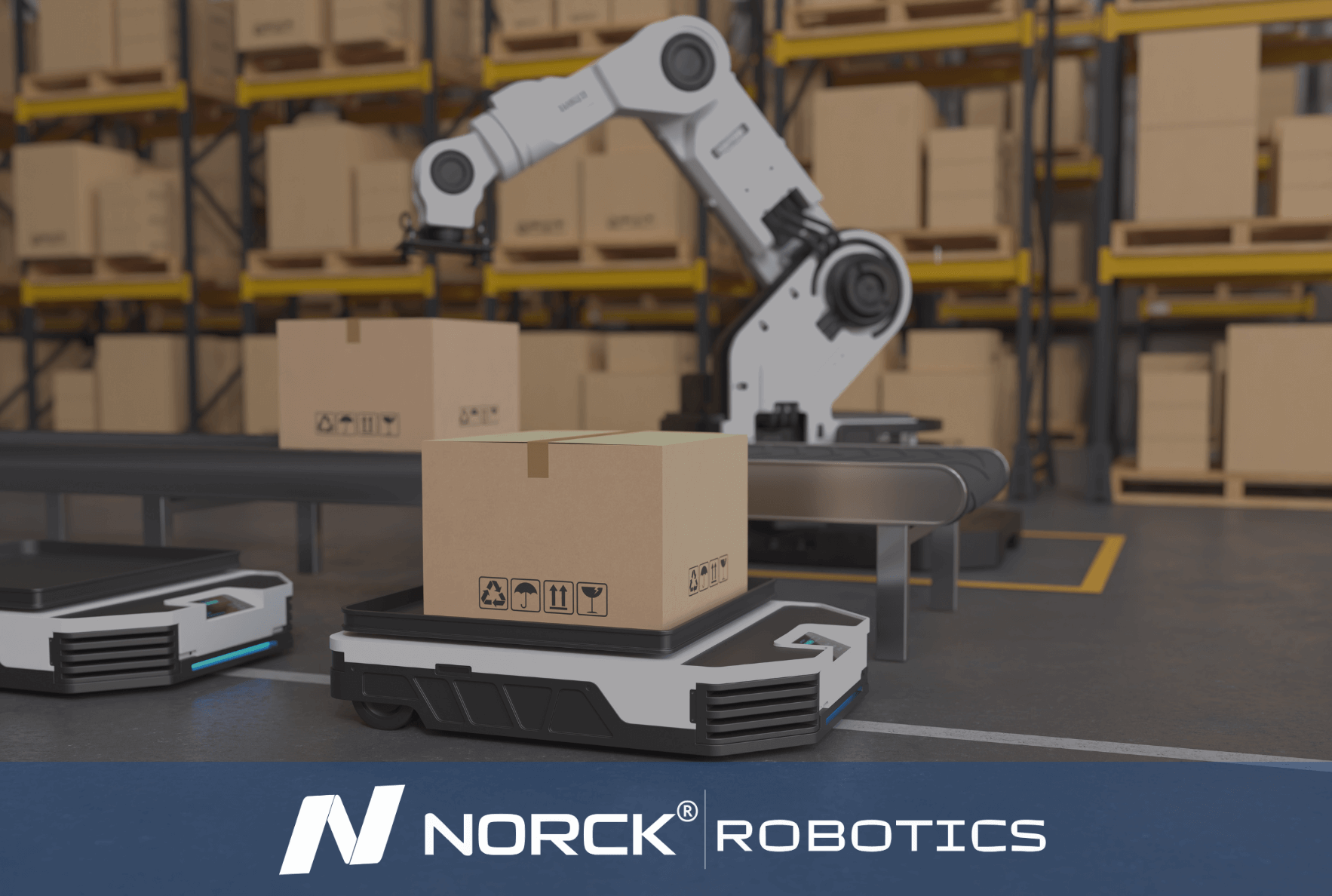
Considered multi-DOF robotic arms or platforms will utilize universal joints as they permit a high degree of flexibility and complex motions. Here are some ways of employment:
It is common to chain multiple universal joints, with each joint adding its own Degrees of Freedom (DOF). The resultant robotic arm moves in a host of directions, such as up/down, left/right, and can rotate or twist.
When motors and gears are added, universal joints become articulated structures that work pretty much like a human arm or leg. Every joint adds to the motion and range of each articulation.
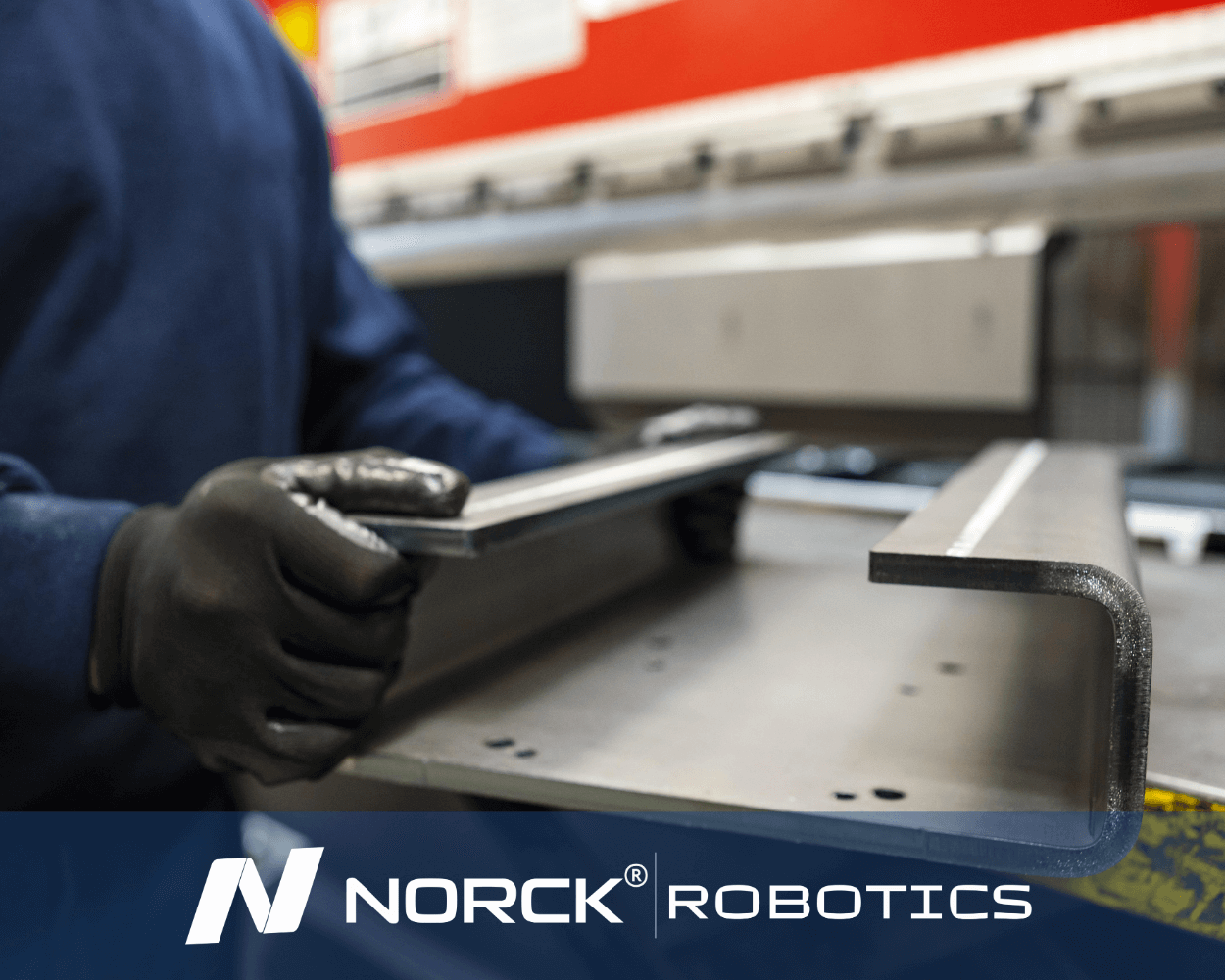
In applications such as welding, painting, or assembly, multi-DOF robotic arms are needed to achieve complex operations. Universal joints provide the sort of precision required since they have several pivot points.
The designer may also choose how many joints there will be and what sort of motion each one will offer, thus enabling the designer to configure a robot's capabilities for a task-whether that task entails delicate laboratory work or grinding manufacture.
Hence, simultaneous inclusion of these universal joints in a robotic system elevates the flexibility while providing control over other industrial and exploratory applications.
Norck Robotics - A division of Norck Inc and Norck GmbH
All Rights Reserved. Copyright © 2025.