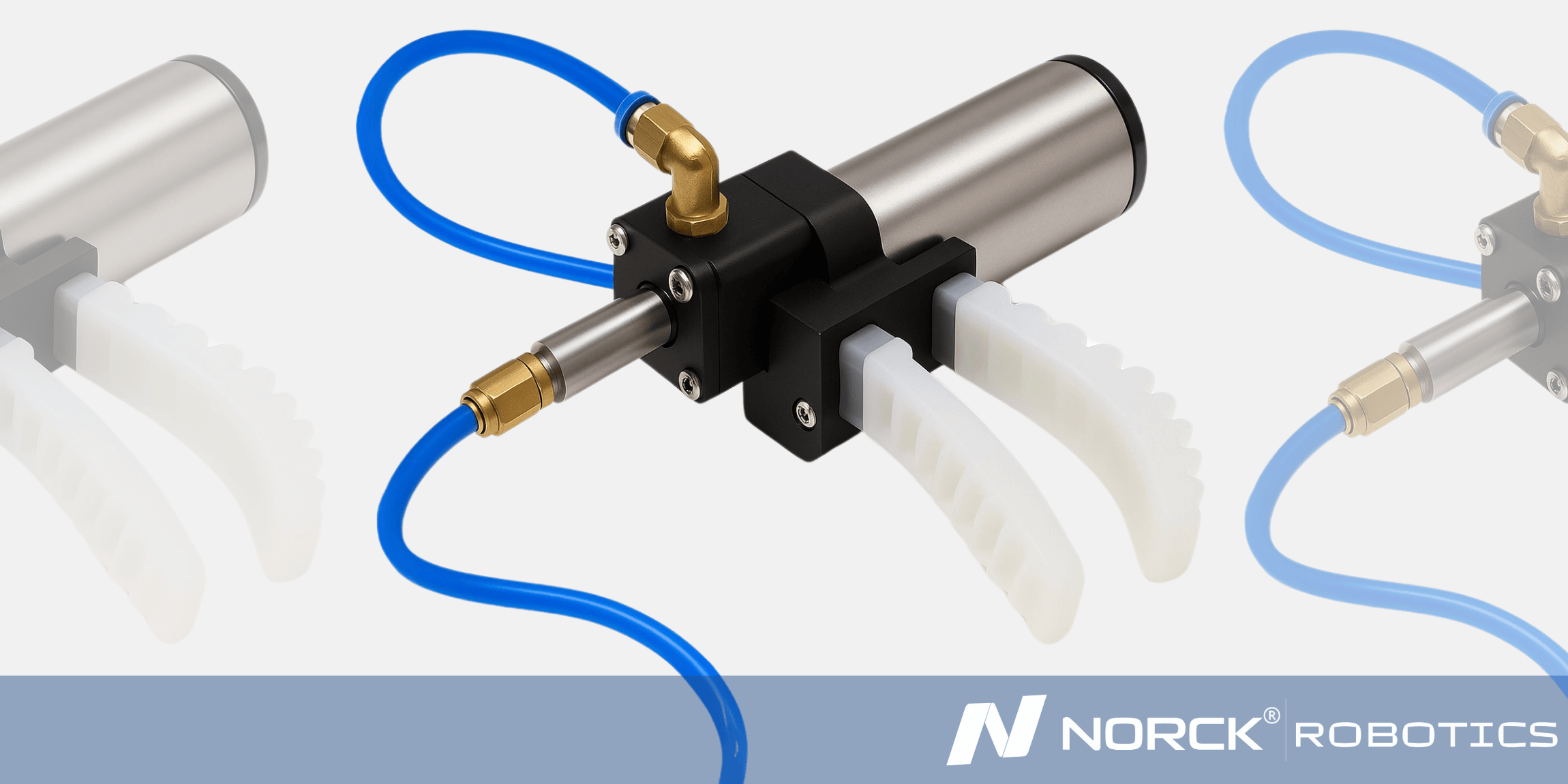
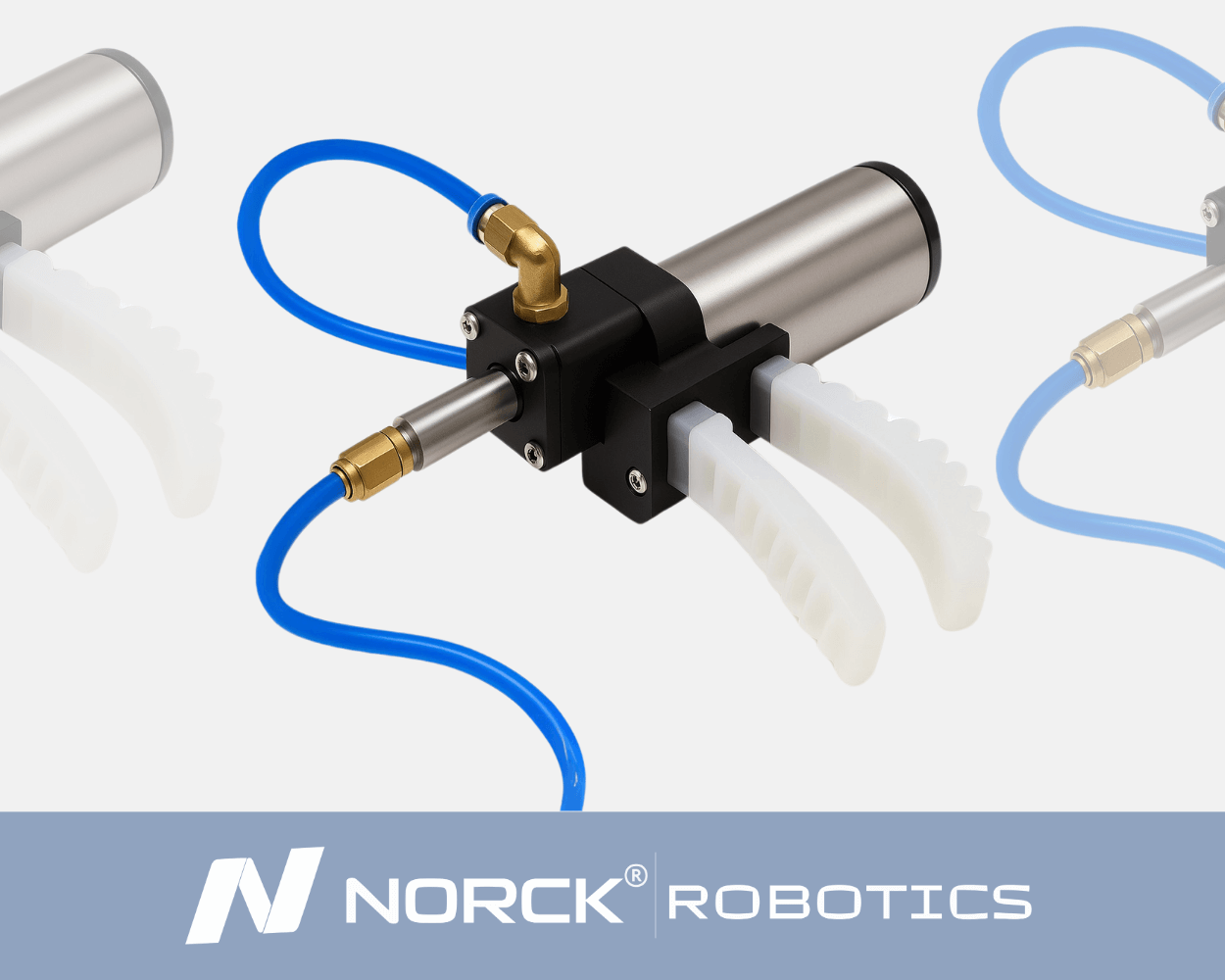
A flexible soft gripper actuator is a finger-like element molded from silicone or other elastomers. When its internal air (or fluid) chambers inflate, the wall stretches and the “finger” curls, gently enveloping objects of many shapes. Because the material is compliant, force spreads over a wide area, so even fragile items—fruit, glass vials, medical ampoules—can be lifted without dents, scratches, or bruises. Compact, food-safe, and easy to sanitize, these actuators are now common on pick-and-place robots in food packaging, e-commerce order-fulfillment, and surgical-assist devices.
Ready to automate your future? Get a quote from Norck Robotics now!
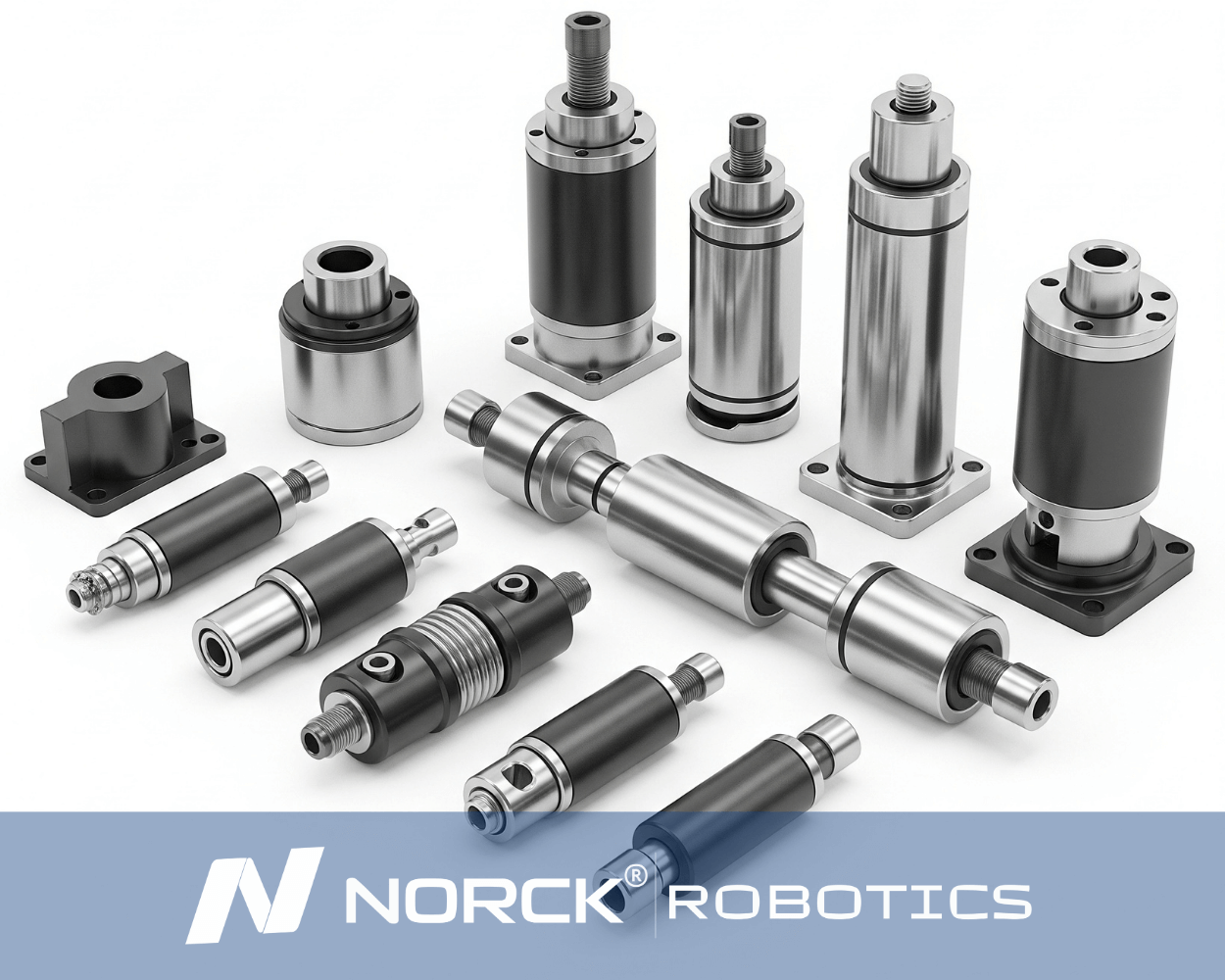
Norck Robotics specializes in providing unique robotic automation and engineering solutions designed to meet the specific operational needs of each client. Our expertise covers a wide range of industries and applications.
Norck Robotics delivers turnkey robotic automation and engineering solutions tailored to your specific needs across various industries.

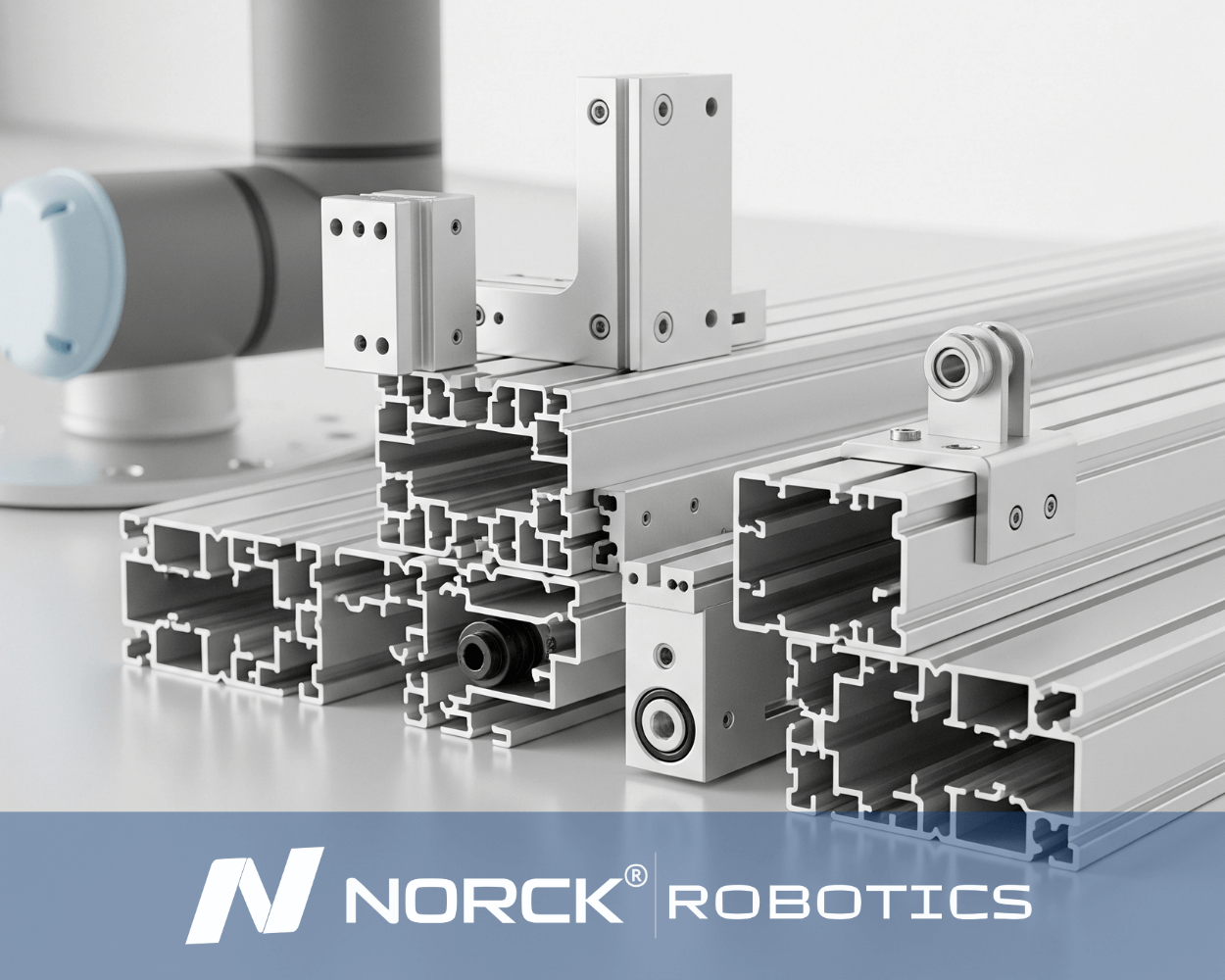
Whether you need a single robotic cell prototype or full-scale factory automation, Norck Robotics engineers are ready to collaborate with you to bring your concept to life.
Norck Robotics engineers analyze your existing processes to provide feedback that enhances efficiency, cost-effectiveness, and productivity for robotic integration.
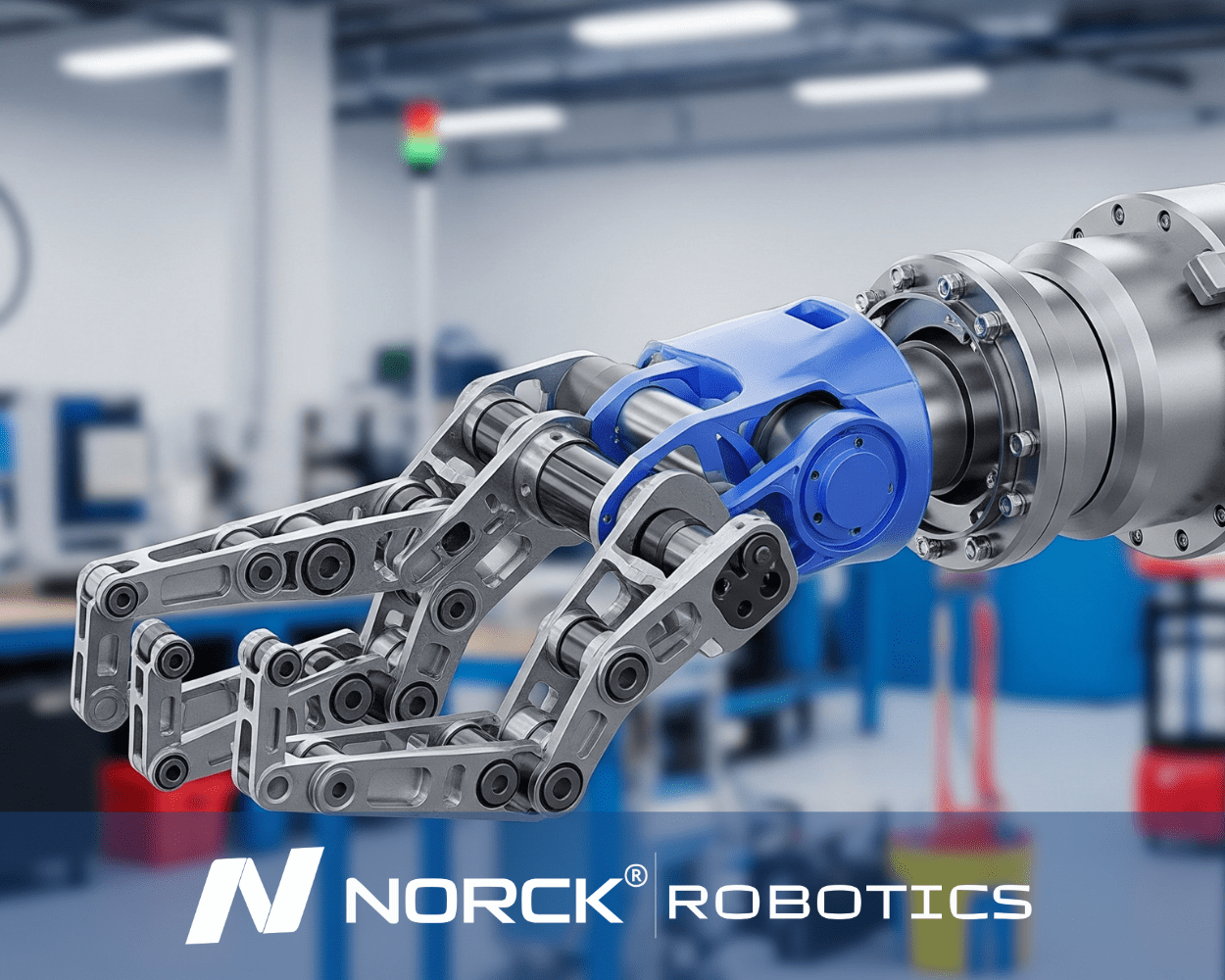
The actuator is the motion source inside each soft-gripper finger. By modulating air pressure, it bends, twists, or elongates, turning an otherwise passive rubber sleeve into an active, shape-adaptive tool. Key advantages:
no point loads; delicate items stay intact.
curling resembles a human hand, improving pick reliability where rigid claws slip.
one gripper tackles tomatoes, circuit boards, or odd-shaped packs without mechanical changeovers.
lightweight (<50 g per finger) and powered by a small compressor or pump, so most cobot wrists can carry it.
Handling of fragile or irregularly shaped objects requires a lot of shape adaptability since the gripper surface must adapt as closely as possible to the object and distribute the forces evenly to prevent damage to the object. On the other hand, rigid grippers apply force in one or two limited contact points and the adaptive grippers always conform around the object, thus holding it more securely and more gently.
Here is why it counts:

In addition to its own expert engineering team, Norck Robotics provides access to a network of hundreds of top-tier system integrators, robot manufacturers, and component suppliers across the United States, Germany, and Europe.

Working with Norck Robotics reduces dependency on manual labor, increases production consistency, and secures your operations against unforeseen disruptions, quality issues, and fluctuations. This enhances your company's supply chain resilience.
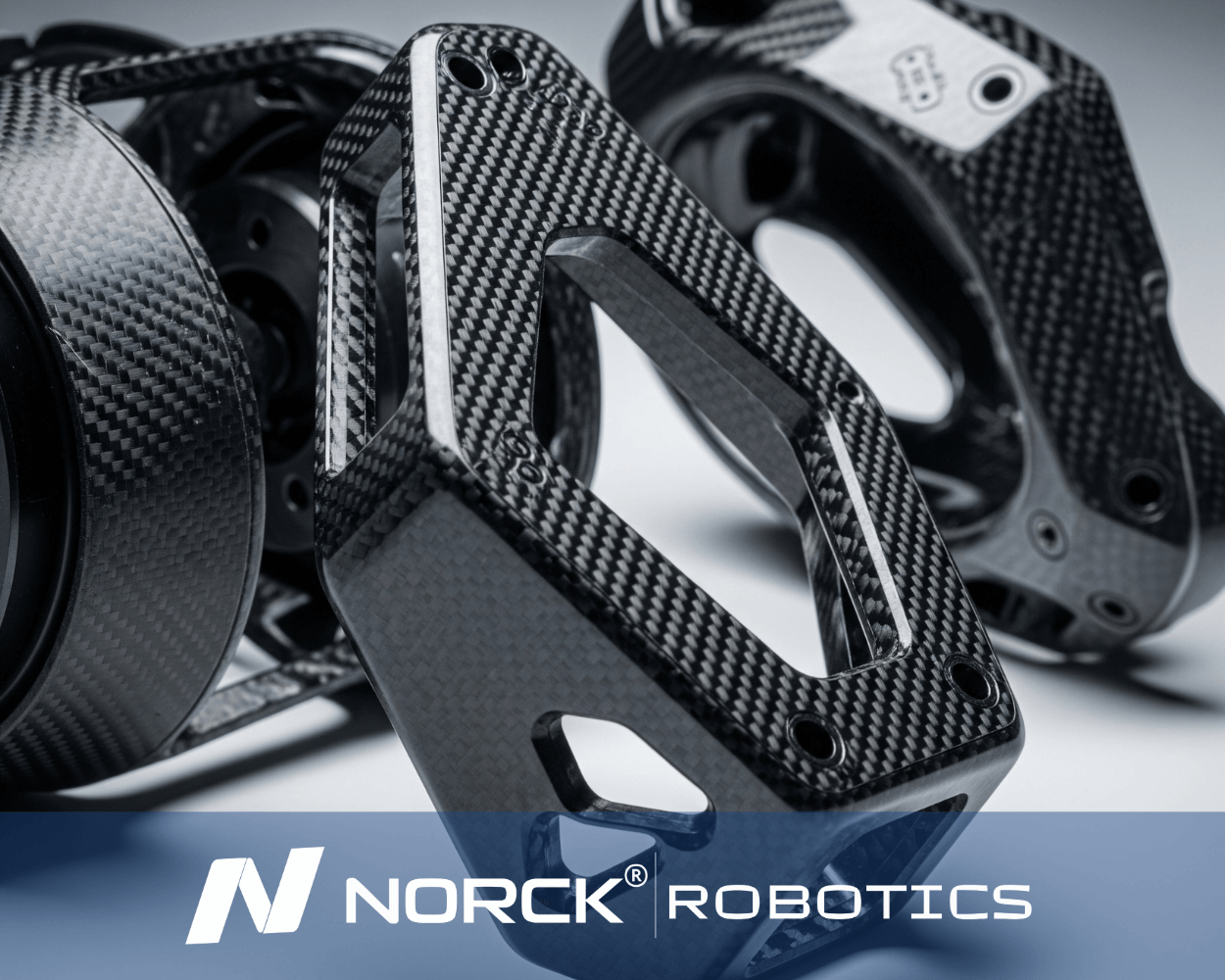
Norck Robotics advances digital automation by developing custom-designed robot grippers, advanced vision systems, and innovative simulation software. With an AI-driven, data-centric approach, it enables smarter system design, optimal performance, and predictive maintenance solutions.
Norck Robotics encourages its partners to be carbon-neutral by reducing energy consumption and material waste through the efficiency of robotic automation, and prioritizes environmentally conscious suppliers.
The soft gripper actuators act by assembling soft materials with different actuation methods to accommodate a great variety of shapes and textures of objects. These are particularly effective when it comes to delicate grasping or gripping of irregular objects, where a rigid design could either damage the object with harshness or might fail to hold it securely. Nearly all the current robotic systems, such as adaptive robotic hands, employ these technologies to make them with human-like expertise and control.
Food & pharma
Food-safe, autoclavable
Costlier than generic rubbers
High-cycle packaging lines
Resists fatigue, controls shape
Slightly stiffer feel
General-purpose gripping
Fast, low-cost valves; easy force control
Needs compressor & hoses
Underwater or high-force tasks
Higher force density
Heavier plumbing
Compact medical tools
Silent, no hoses
Slow cooling limits duty cycle
Research prototypes
µs response, no pump
Requires high voltage drive
Together, these materials and actuation schemes give soft grippers the adaptability, gentleness, and speed demanded by modern automation—from packing peaches to guiding surgical catheters.
Norck Robotics - A division of Norck Inc and Norck GmbH
All Rights Reserved. Copyright © 2025.