
Ready to automate your future? Get a quote from Norck Robotics now!
Norck Robotics specializes in providing unique robotic automation and engineering solutions designed to meet the specific operational needs of each client. Our expertise covers a wide range of industries and applications.
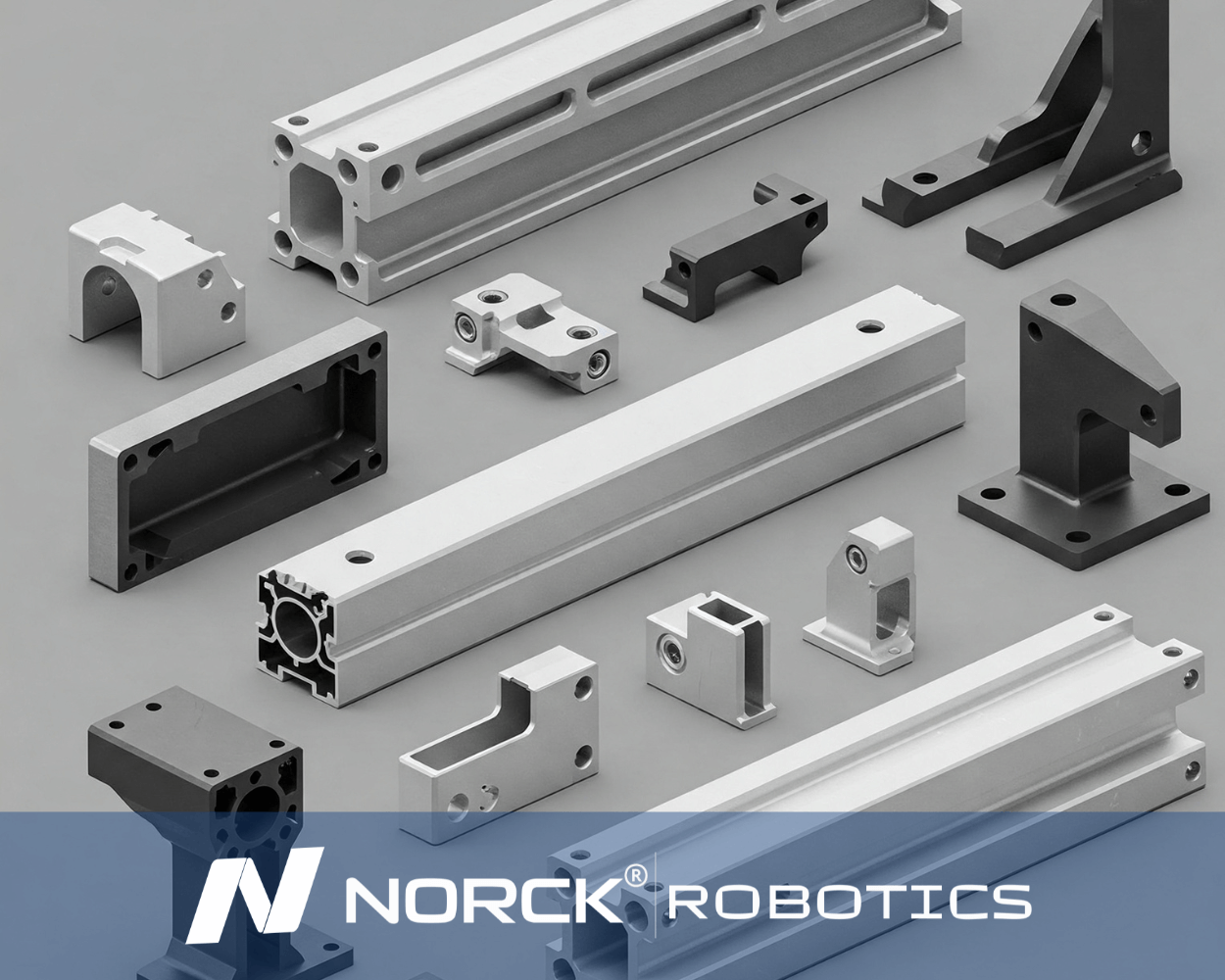
Norck Robotics delivers turnkey robotic automation and engineering solutions tailored to your specific needs across various industries.

Whether you need a single robotic cell prototype or full-scale factory automation, Norck Robotics engineers are ready to collaborate with you to bring your concept to life.
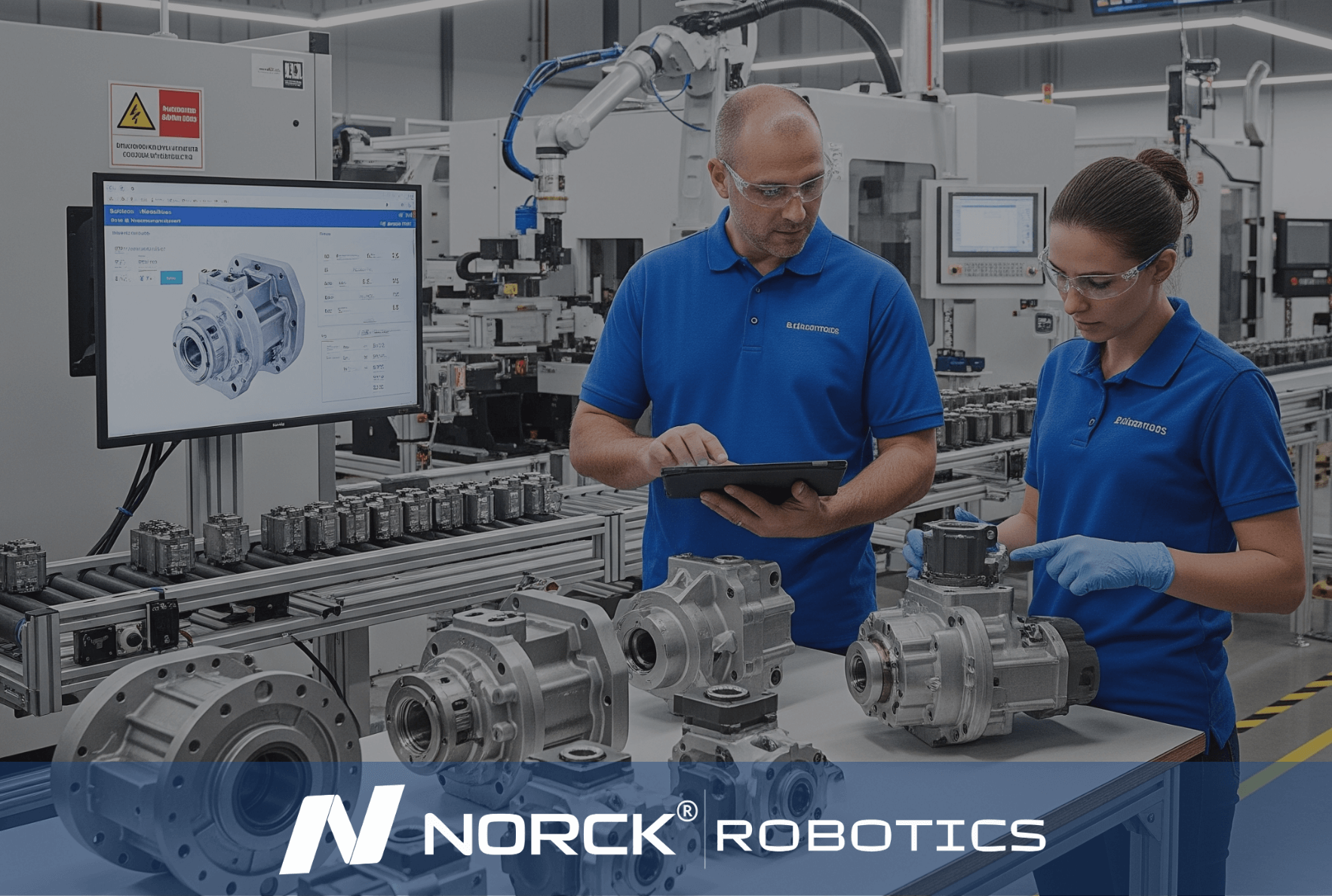
Norck Robotics engineers analyze your existing processes to provide feedback that enhances efficiency, cost-effectiveness, and productivity for robotic integration.
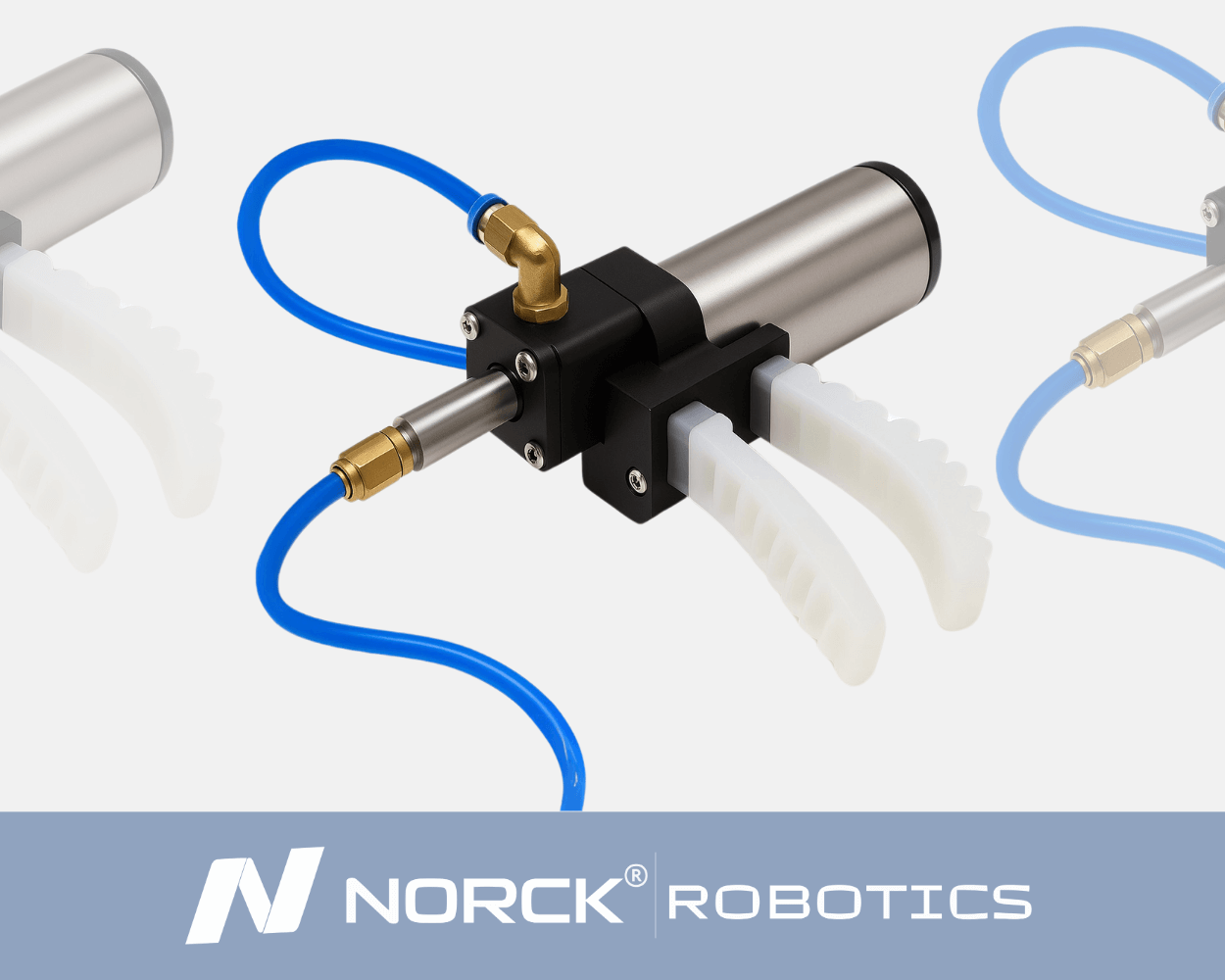
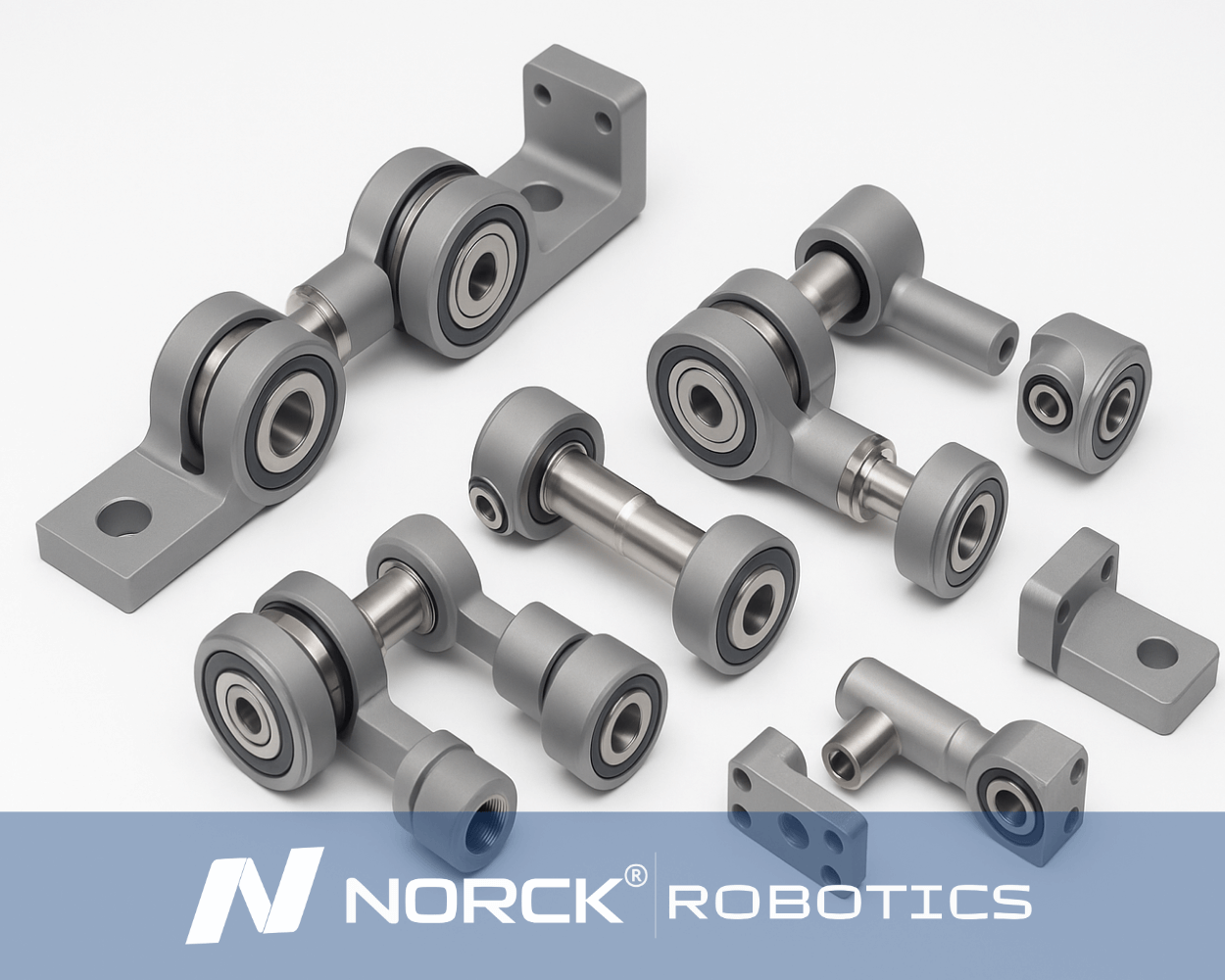
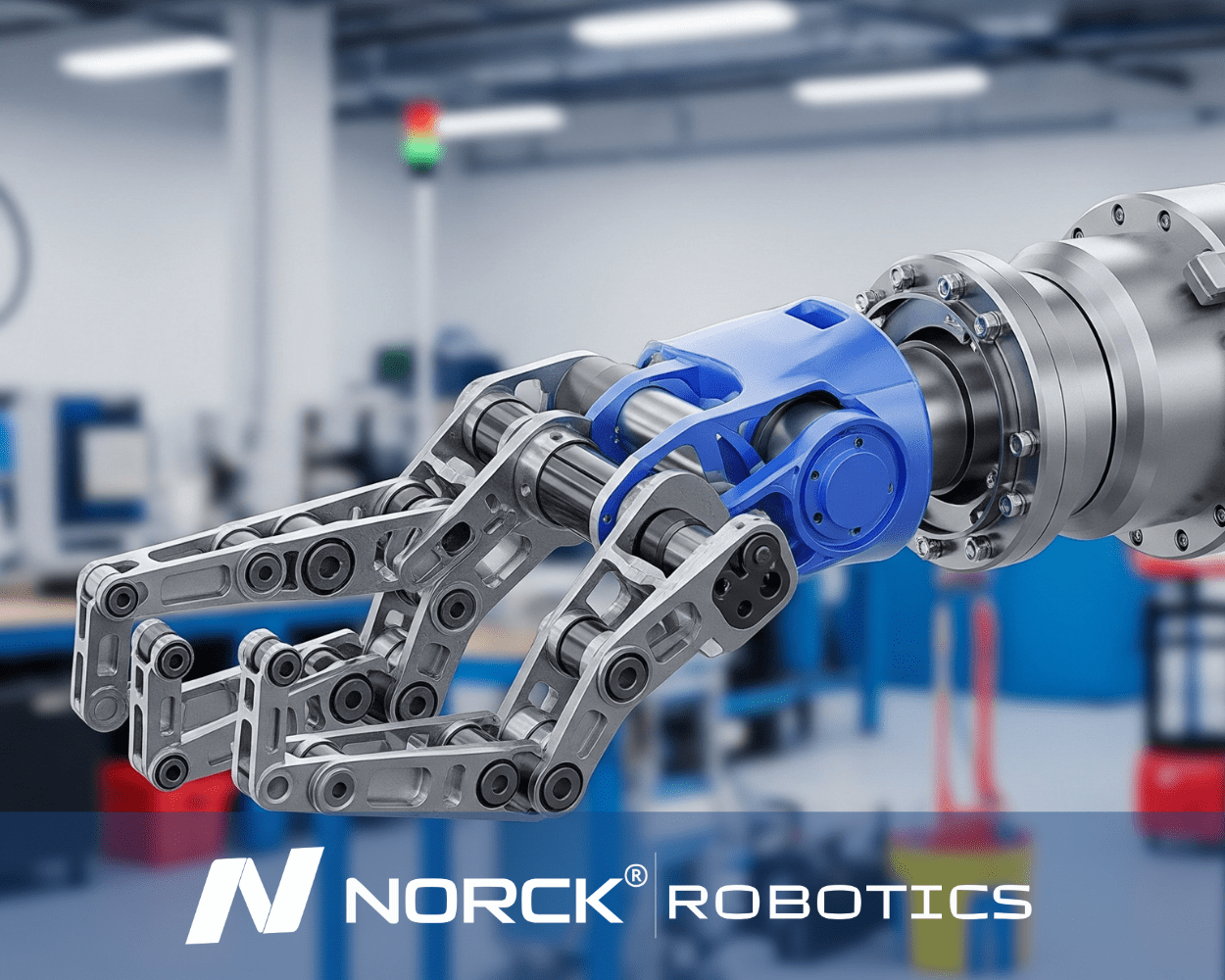
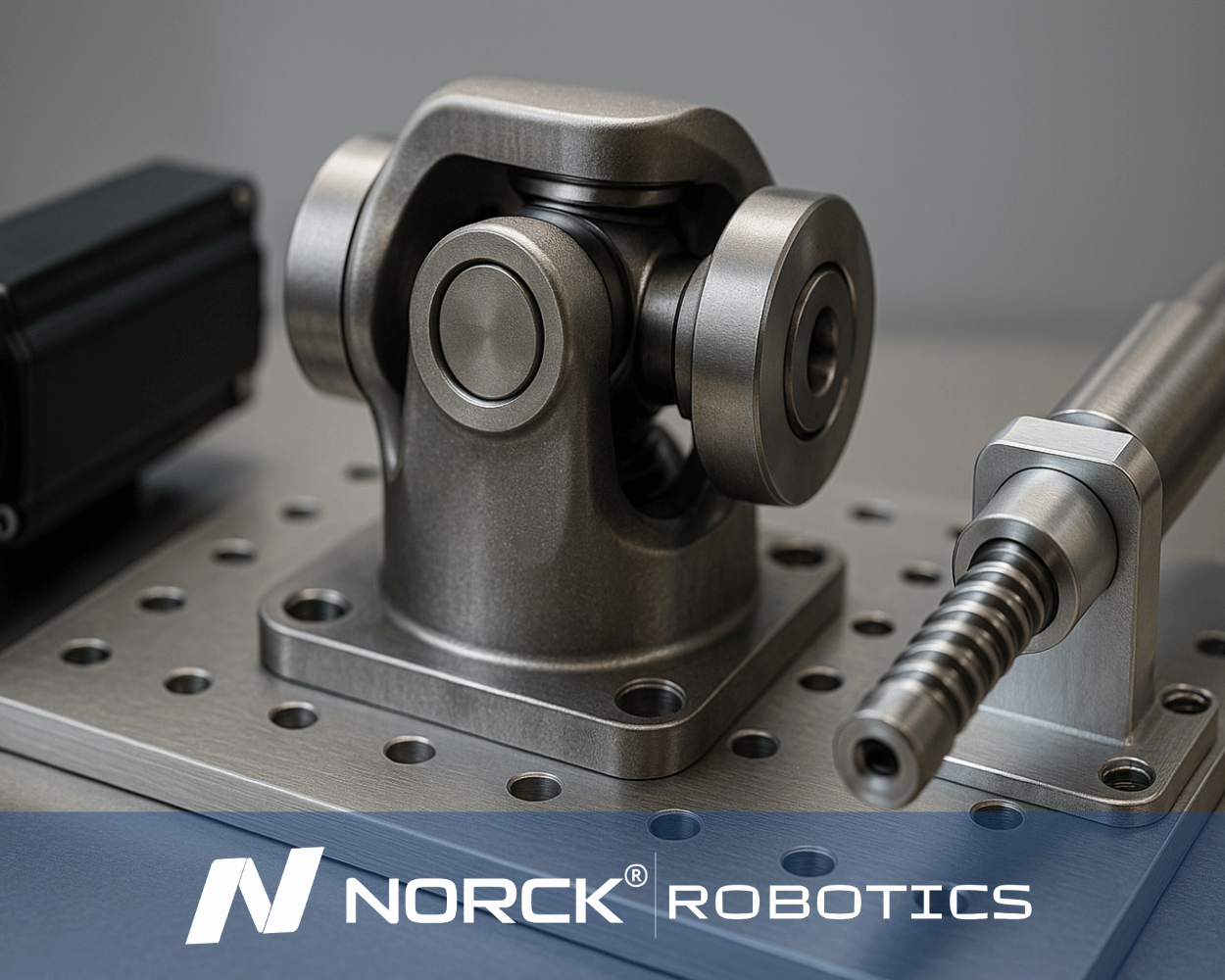
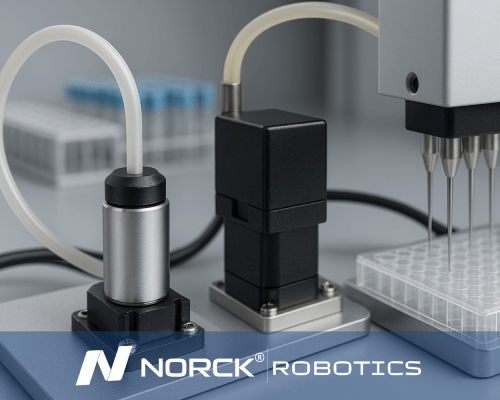
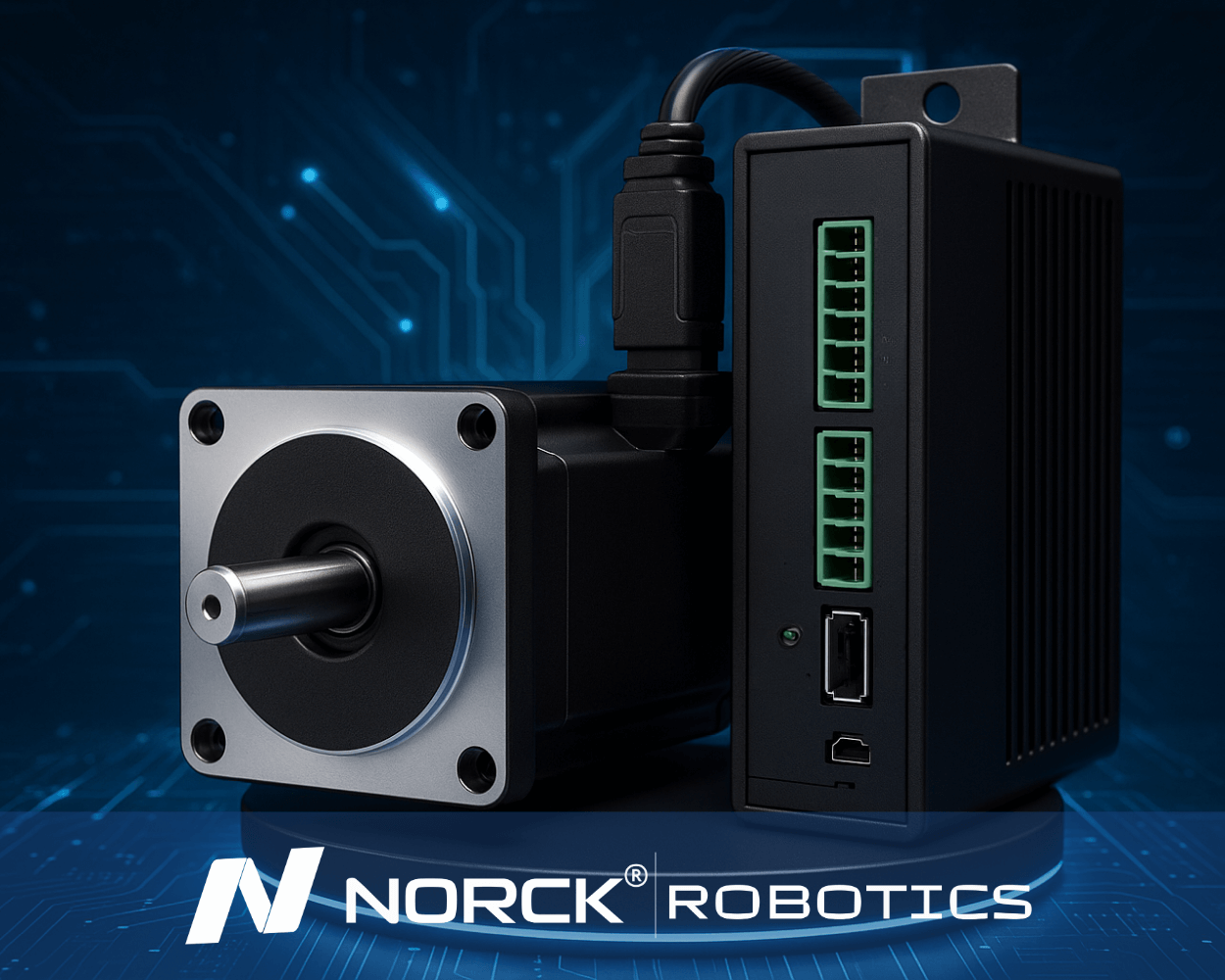
The forces acting on the jittery wrist of robots have to be considered so that higher levels of precision, safety, and control could be exercised upon the automatic systems. This very Force Feedback Wrist Motor/Joint is in place to detect the forces that could be created during robotic movements and thus to enable the robot to feel its environment and react accordingly in real-time. This is a very critical aspect in tasks involving delicate handling, variable application of force, or interaction with an unknown surface.
Force-feedback once enabled in a robotic wrist will measure the contact pressure and react thereto by applying just that amount of contact force necessary for the task at hand, especially assembly, polishing, or handling delicate electronics.
In medical device manufacturing or electronics assembly fragile components have to be handled. Force feedback ensures there will be just enough adjustment of grip force and motion so that the parts are spared from damage
Within real-time feedback, such a wrist can adapt to differences with regard to materials, surface textures, or alignment: no manual reprogramming is needed, adding flexibility to the production line.
The Force Feedback Wrist Motor/Joint ensures the fine consistency of force and applied pressure through its implementation on different repetitive tasks, reducing variability and increasing quality in automated operations.
Recognizing resistance or unexpected forces, it could restrain, halt, or bypass
an action so as to prevent damage to parts, tools, or even human fellows
nearby.
With the Force Feedback Wrist Motor/Joint, manufacturers will raise the levelof intelligence and chronological responsiveness in robotic systems, thus increasingproductivity, quality, and safety in a wide range of industrial applications.

In addition to its own expert engineering team, Norck Robotics provides access to a network of hundreds of top-tier system integrators, robot manufacturers, and component suppliers across the United States, Germany, and Europe.

Working with Norck Robotics reduces dependency on manual labor, increases production consistency, and secures your operations against unforeseen disruptions, quality issues, and fluctuations. This enhances your company's supply chain resilience.
Norck Robotics advances digital automation by developing custom-designed robot grippers, advanced vision systems, and innovative simulation software. With an AI-driven, data-centric approach, it enables smarter system design, optimal performance, and predictive maintenance solutions.
Norck Robotics encourages its partners to be carbon-neutral by reducing energy consumption and material waste through the efficiency of robotic automation, and prioritizes environmentally conscious suppliers.
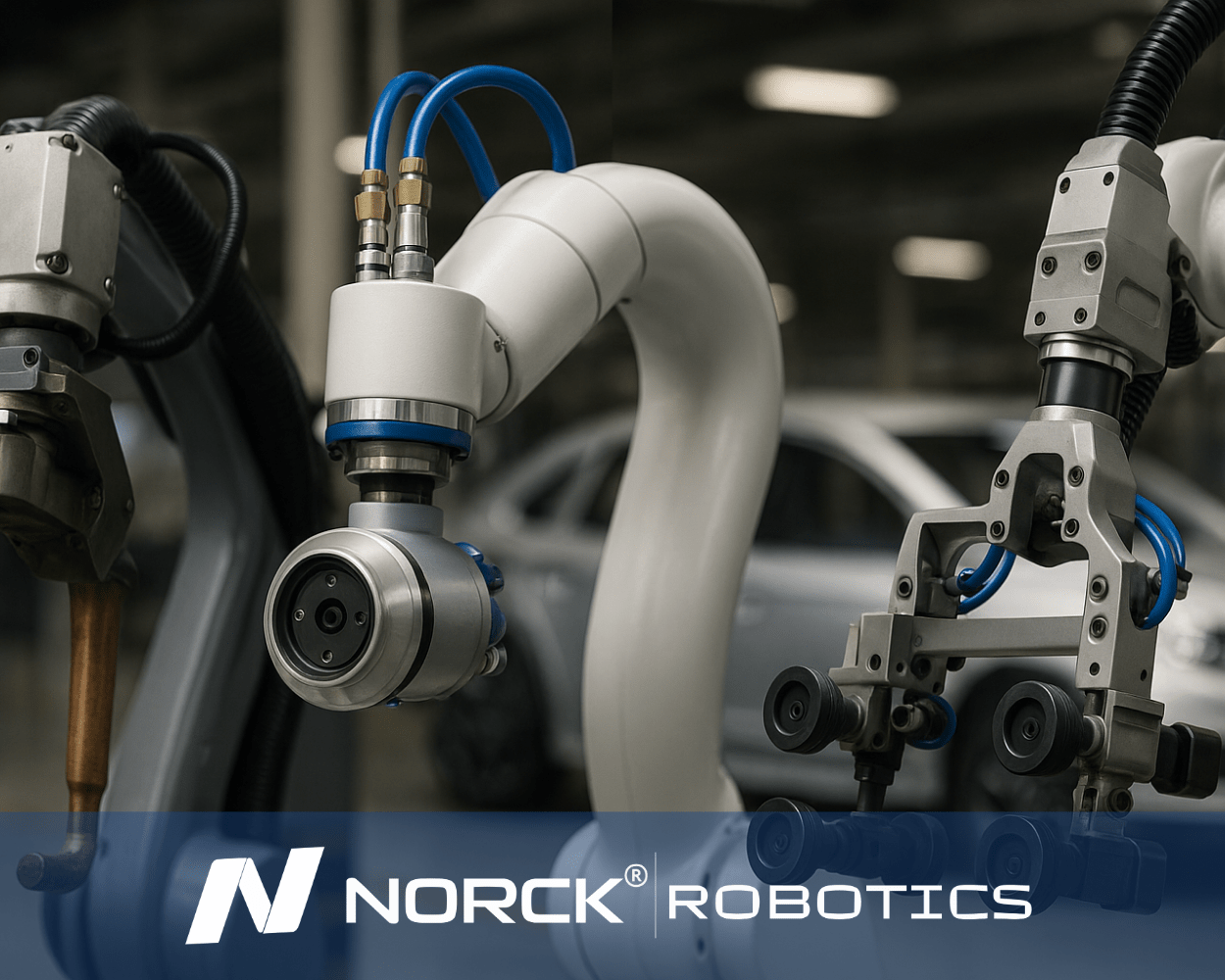
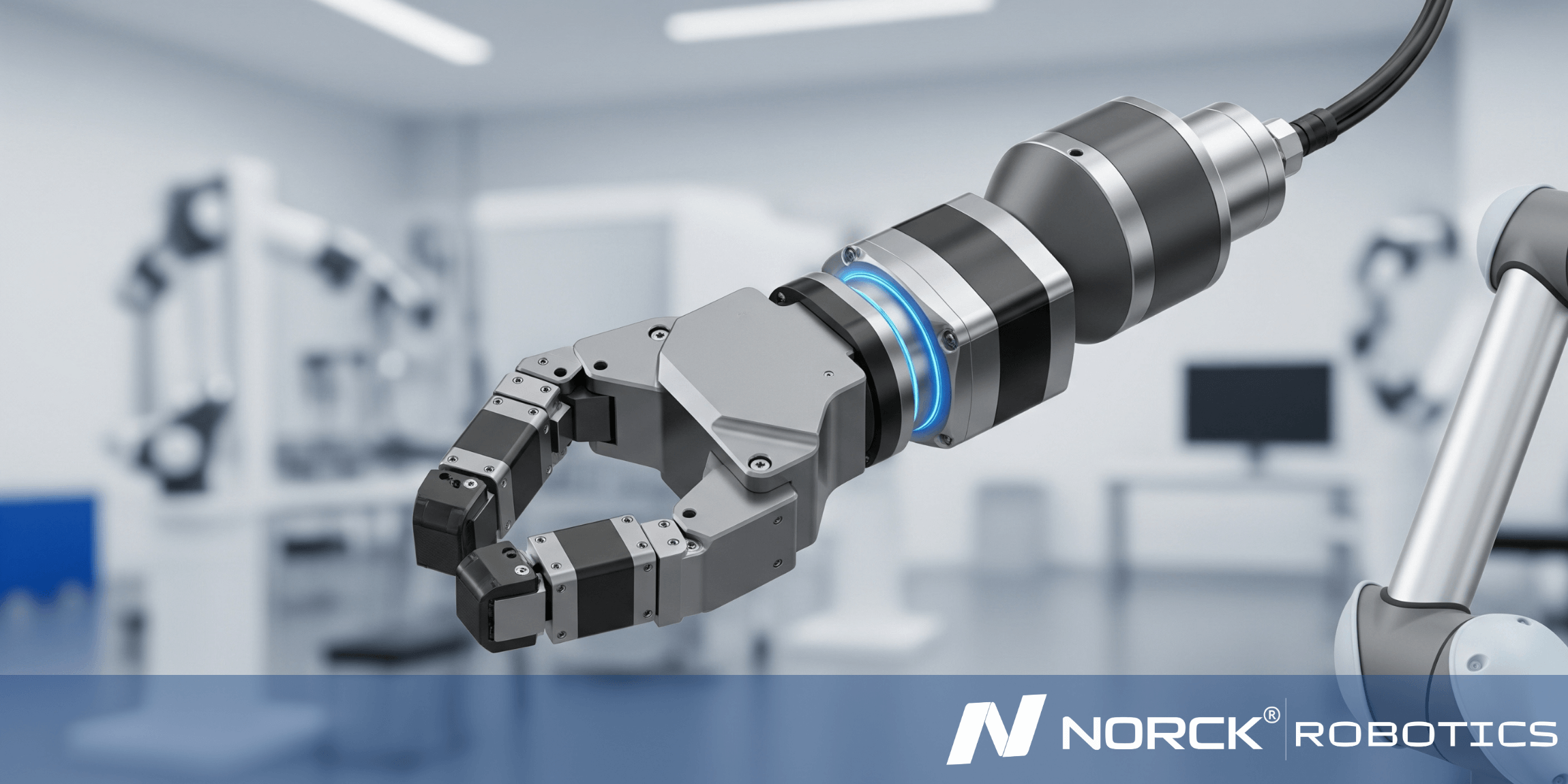
Force feedback technology finds its essential applications in situational demands requiring precision, safety, and responsiveness. The Force Feedback Wrist Motor/Joint offers real-time tactile sensing and control adaptation and thus becomes an ideal solution for innumerable industries. From minimally invasive surgical applications to industrial collaborative robotic systems, force feedback makes it possible for a robot to interact more humanly with its environment: safely, intelligently, and efficiently.
Some Important Industrial Areas for Force
Feedback Application:
In minimally invasive surgery and robot-assisted operations, giving force feedback allows surgeons to feel resistance or pressure on the robotic instruments, thus improving surgeon control, decreasing tissue damage, and enhancing the surgical outcome.
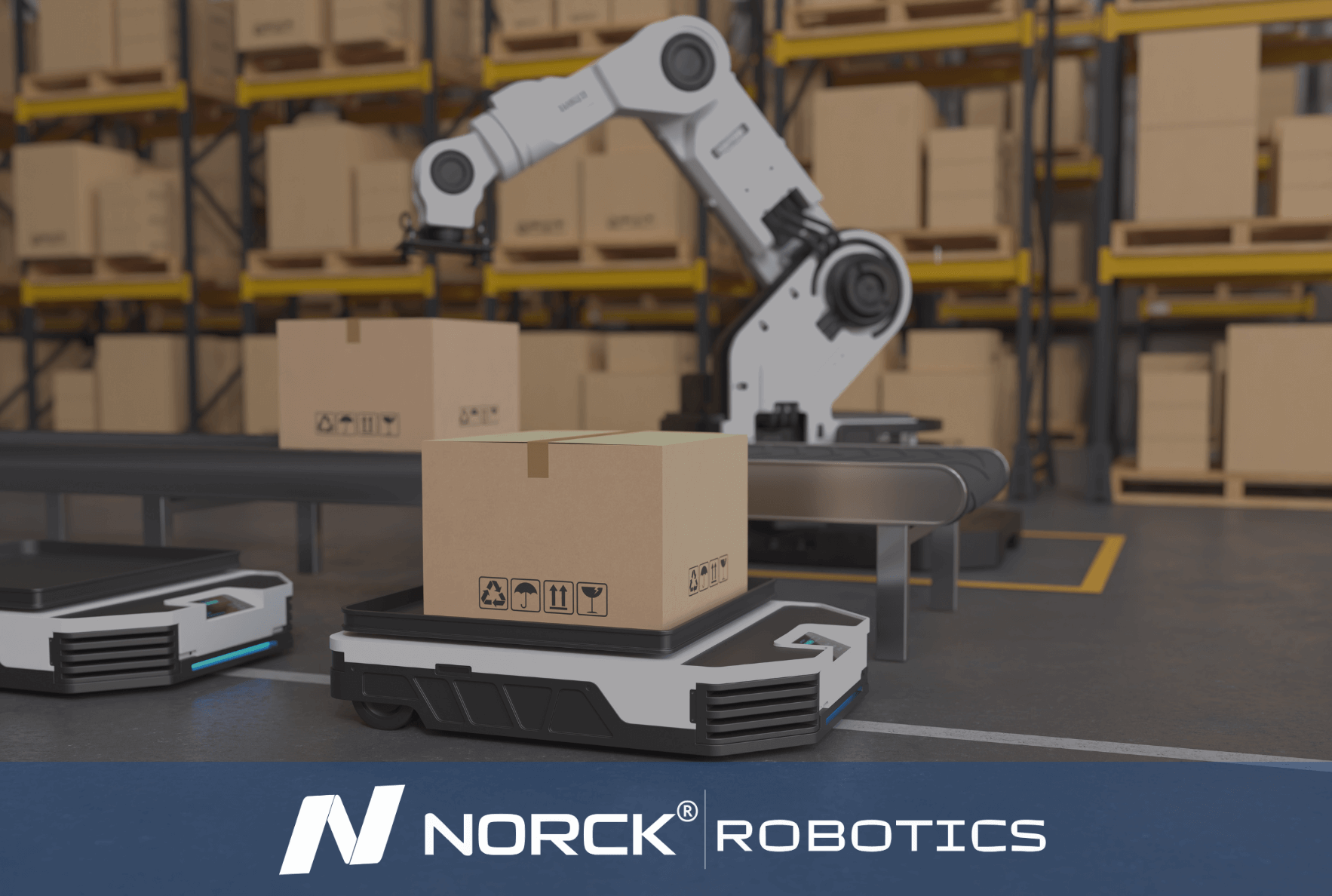
In shared spaces, force feedback ensures that robots recognize human interactions and respond instinctively by reducing power or stopping completely, thereby enabling safe and productive collaboration with humans on assembly, packaging, or inspection.
In assembling minuscule and fragile components, it requires the most delicate touch to apply pressure. The Force Feedback Wrist Motor/Joint would aid in application of the proper amount of force, thereby reducing the possibility of damage and enhancing yield in high-precision manufacturing.
Force feedback is what gives an artificial limb-user a sense of how touching or gripping firmness to feel more like natural, spontaneous movements of putting his/her limbs into everyday tasks.
In tactile inspection, force feedback measures surface variation, alignment mismatches, or material inconsistencies. All these become crucial in the automotive, aerospace, and electronics quality control processes.
In food packaging, pharmaceutical, and consumer electronics industries, force feedback supports robots in gently grasping the products.
The Force Feedback Wrist Motor/Joint acts as an enabling technology for the next generation of automation, thus promoting better intelligence and safety-based robotic performances in sensitive and collaborative environments.
Norck Robotics - A division of Norck Inc and Norck GmbH
All Rights Reserved. Copyright © 2025.