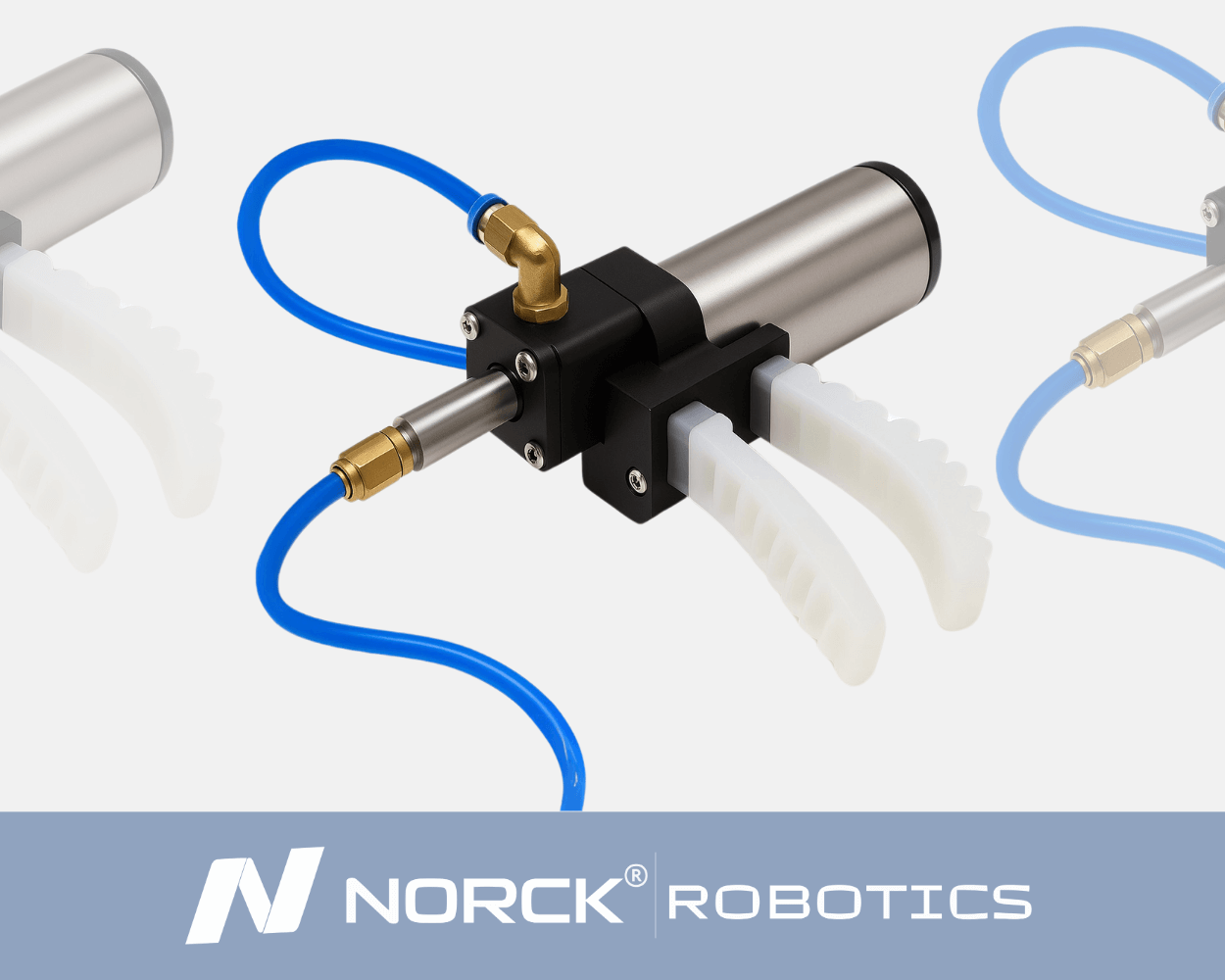
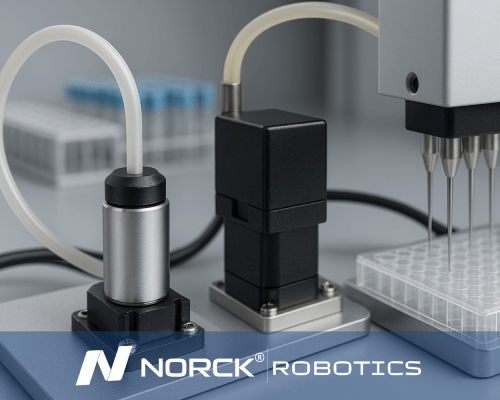
Detail: Miniature mechanical or pneumatic grippers designed for handling very small items like vials, caps, or specific labware where vacuum handling might not be suitable. Require precise force control to avoid damaging fragile items.
Ready to automate your future? Get a quote from Norck Robotics now!
Norck Robotics specializes in providing unique robotic automation and engineering solutions designed to meet the specific operational needs of each client. Our expertise covers a wide range of industries and applications.
Norck Robotics delivers turnkey robotic automation and engineering solutions tailored to your specific needs across various industries.

Whether you need a single robotic cell prototype or full-scale factory automation, Norck Robotics engineers are ready to collaborate with you to bring your concept to life.
Norck Robotics engineers analyze your existing processes to provide feedback that enhances efficiency, cost-effectiveness, and productivity for robotic integration.
Micro-grippers are used instead of vacuum handling in the lab environment when the items in question need grasping that can be more specified or targeted than suction alone can provide. This is especially important for objects that are irregularly shaped, porous, too small, or that are not flat, where a vacuum may be unable to make a proper seal, but also not provide sufficient stability during transport.
Pneumatic micro grippers or electric micro-grippers would generally be the correct tools to use to securely grip small vials, tube caps, uniquely shaped lab ware etc. Grippers can provide precise force, which can be necessary for handling delicate or fragile parts without deforming or breaking them. Furthermore, in situations of low contamination levels (i.e. sterile environments), mechanical grippers do have more specifically selectable areas of contact than vacuum systems. For these reasons, micro-grippers are excellent choices for precise and repeatable tasks of a laboratory automation effort, while traditional vacuum systems may be unreliable or impractical to use.
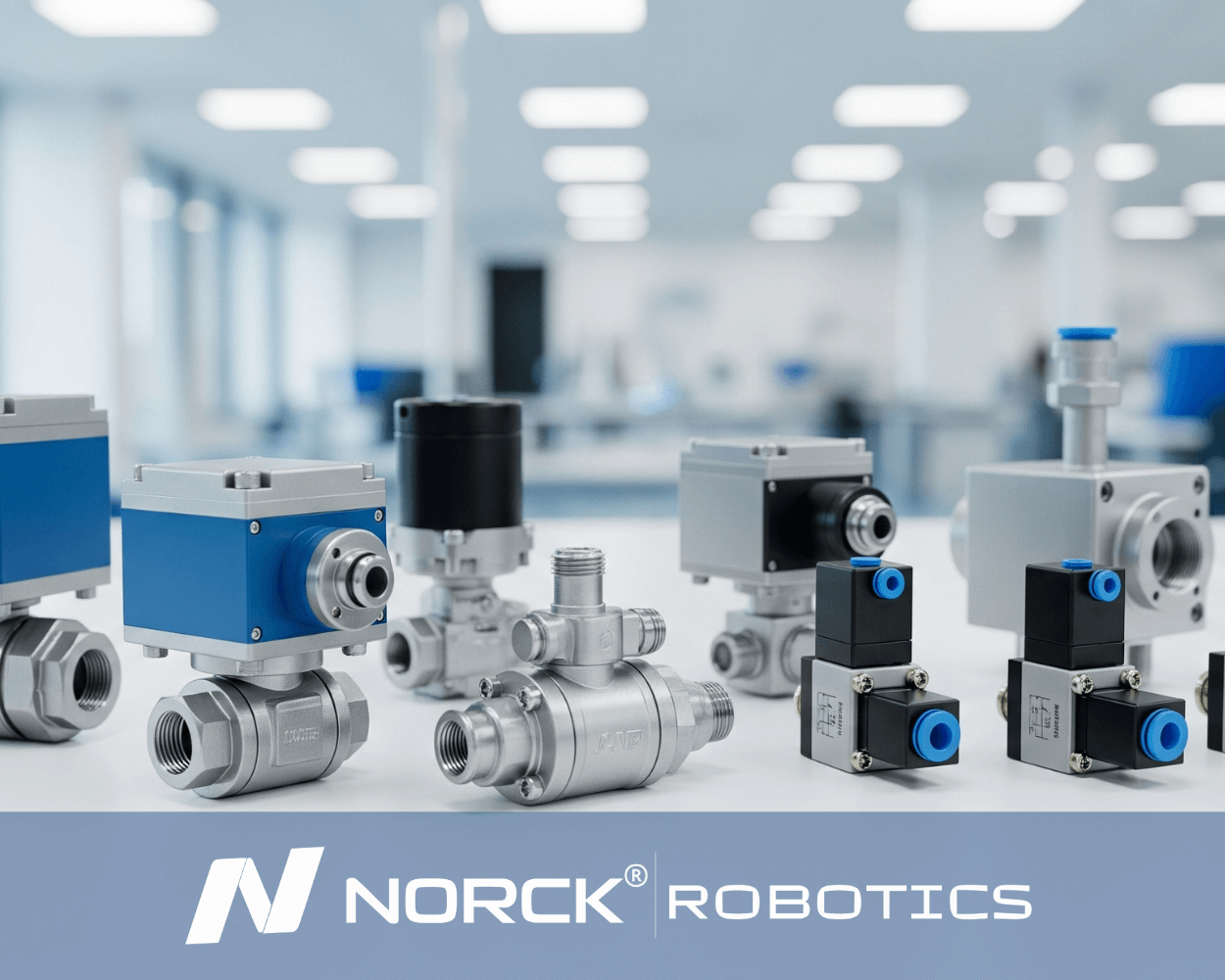
Micro-grippers are applied with pneumatic or electric actuation methods, based on the tasks needed for lab automation.
Pneumatic micro-grippers use compressed air. Compared to size, pneumatic micro-grippers have relatively quick response times and high gripping-force. Pneumatic micro-grippers are best for quick pick-and-place scenarios. Pneumatic grippers can also be optimized to create softer or rigid grips depending on the air pressure.
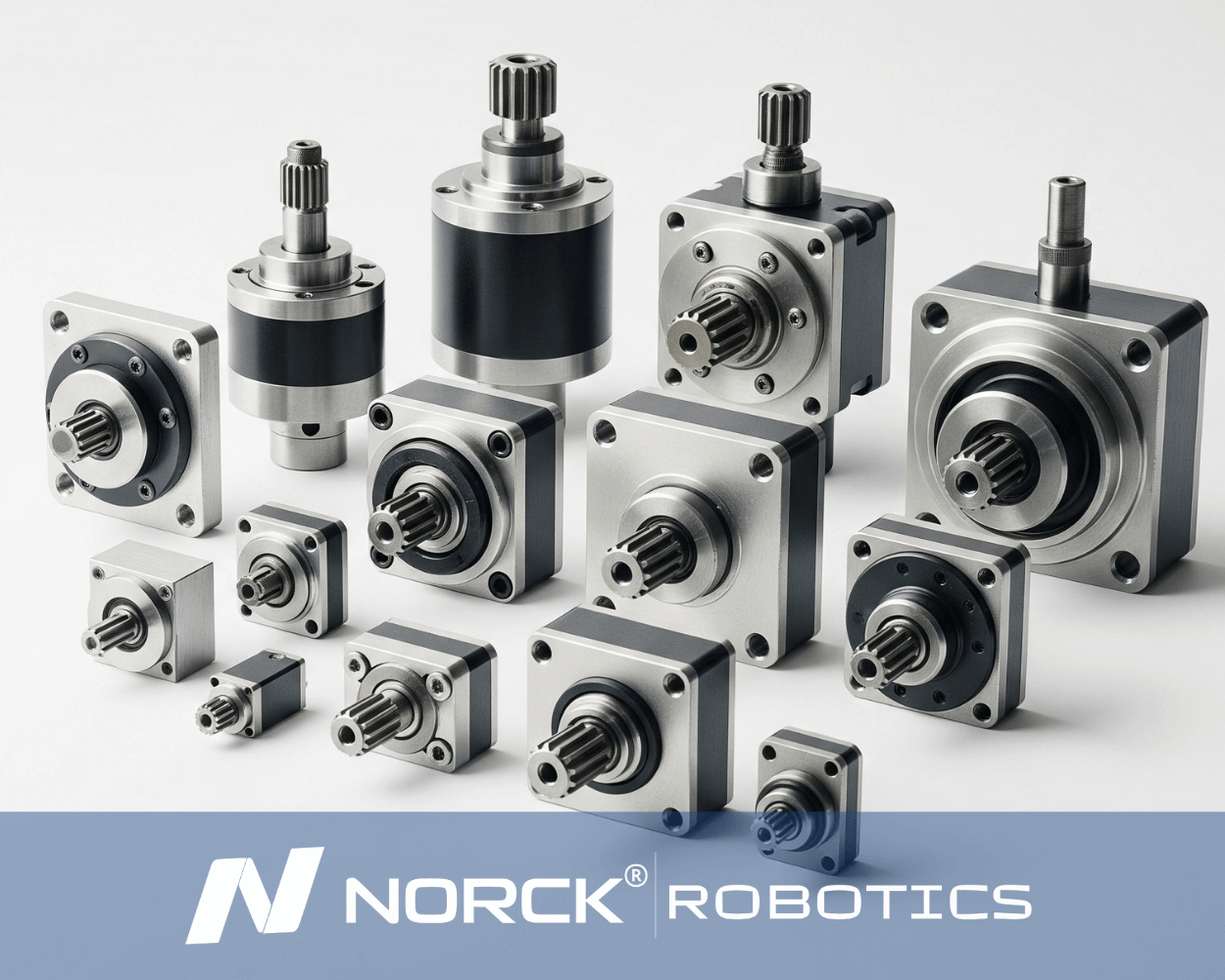
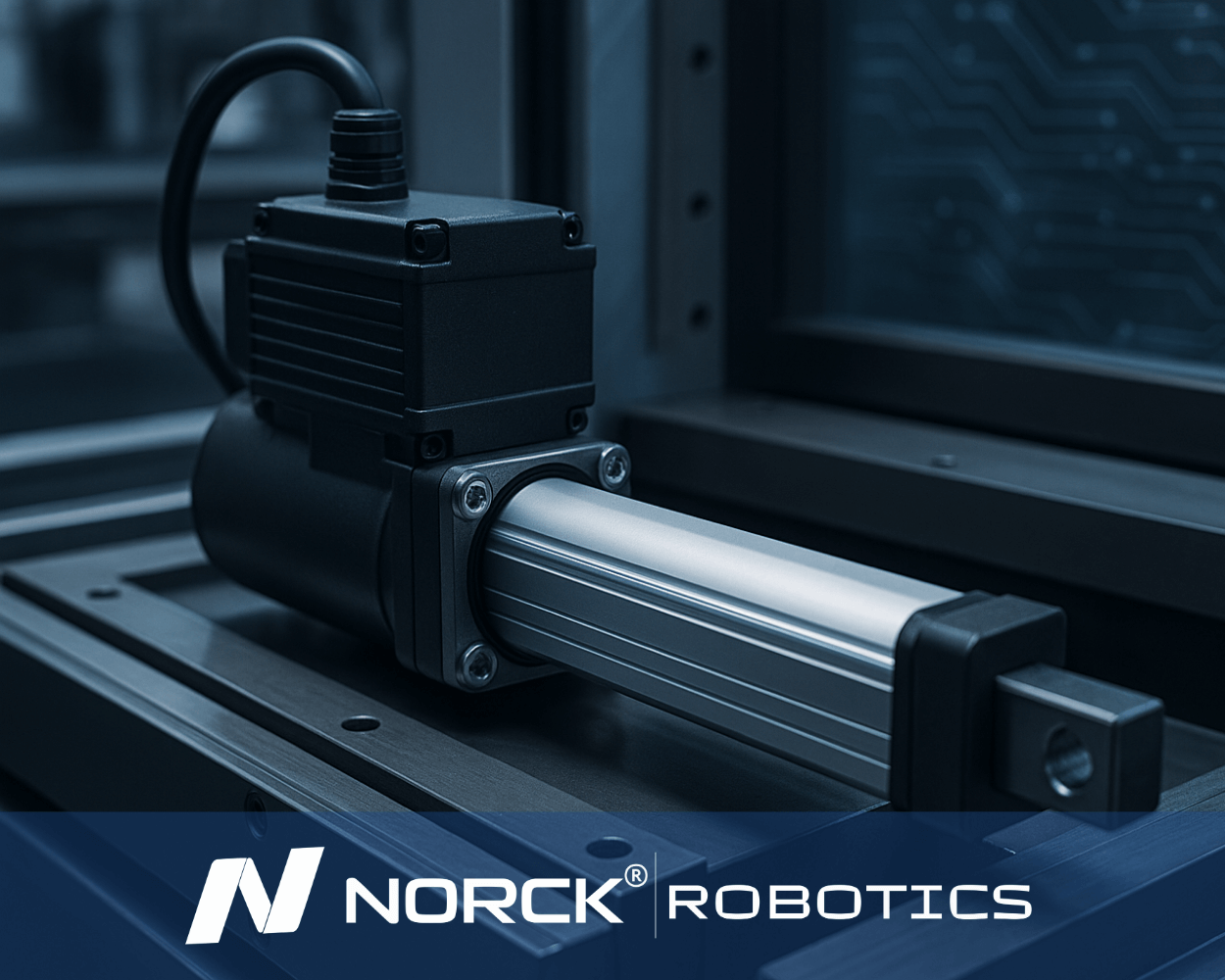
Electric micro-grippers use miniature motors or servos to drive a mechanism that offers precise control regarding the gripping force and gripping position. Electric micro-grippers have clear advantages in instances that require delicate or variable-shaped items, where it is important to use consistent or programmable gripping force.
The selection of pneumatic and electric is often dependent on the precision, control, and speed desired for lab automation as well as whether the gripper can be integrated to a lab automation system.

In addition to its own expert engineering team, Norck Robotics provides access to a network of hundreds of top-tier system integrators, robot manufacturers, and component suppliers across the United States, Germany, and Europe.

Working with Norck Robotics reduces dependency on manual labor, increases production consistency, and secures your operations against unforeseen disruptions, quality issues, and fluctuations. This enhances your company's supply chain resilience.
Norck Robotics advances digital automation by developing custom-designed robot grippers, advanced vision systems, and innovative simulation software. With an AI-driven, data-centric approach, it enables smarter system design, optimal performance, and predictive maintenance solutions.
Norck Robotics encourages its partners to be carbon-neutral by reducing energy consumption and material waste through the efficiency of robotic automation, and prioritizes environmentally conscious suppliers.
In micro-grippers, force control usually relies on high-tech actuation systems but also sensor feedback and the wise design of mechanical systems to not damage delicate things in the lab.
Many of the micro-grippers have been designed with force or pressure sensors capable of continuously measuring gripping force. Depending on the application, grippers with sensors could allow the operator to adjust the grip while in operation to prevent squeezing an especially delicate item, or dropping a sensitive item altogether.
For pneumatic grippers, force control is as easy as changing the air pressure, where lower pressures would be selected for particularly sensitive components such as thin glass vials, or soft caps.
Electric micro-grippers can also allow for precise programmed adjustments to the force applied, this allows for delivery of consistent, repeatable, controllable force made to the fragile of the item.
A combination of soft materials and compliant mechanisms were often used in gripper jaws to help spread pressure across a larger gripping surface; this being used to to minimize the chance of damaging the item.
With use of these combined strategy approaches, micro-grippers can be used reliably and safely with fragile labware, in high-throughput automated systems.
Norck Robotics - A division of Norck Inc and Norck GmbH
All Rights Reserved. Copyright © 2025.