
Ready to automate your future? Get a quote from Norck Robotics now!
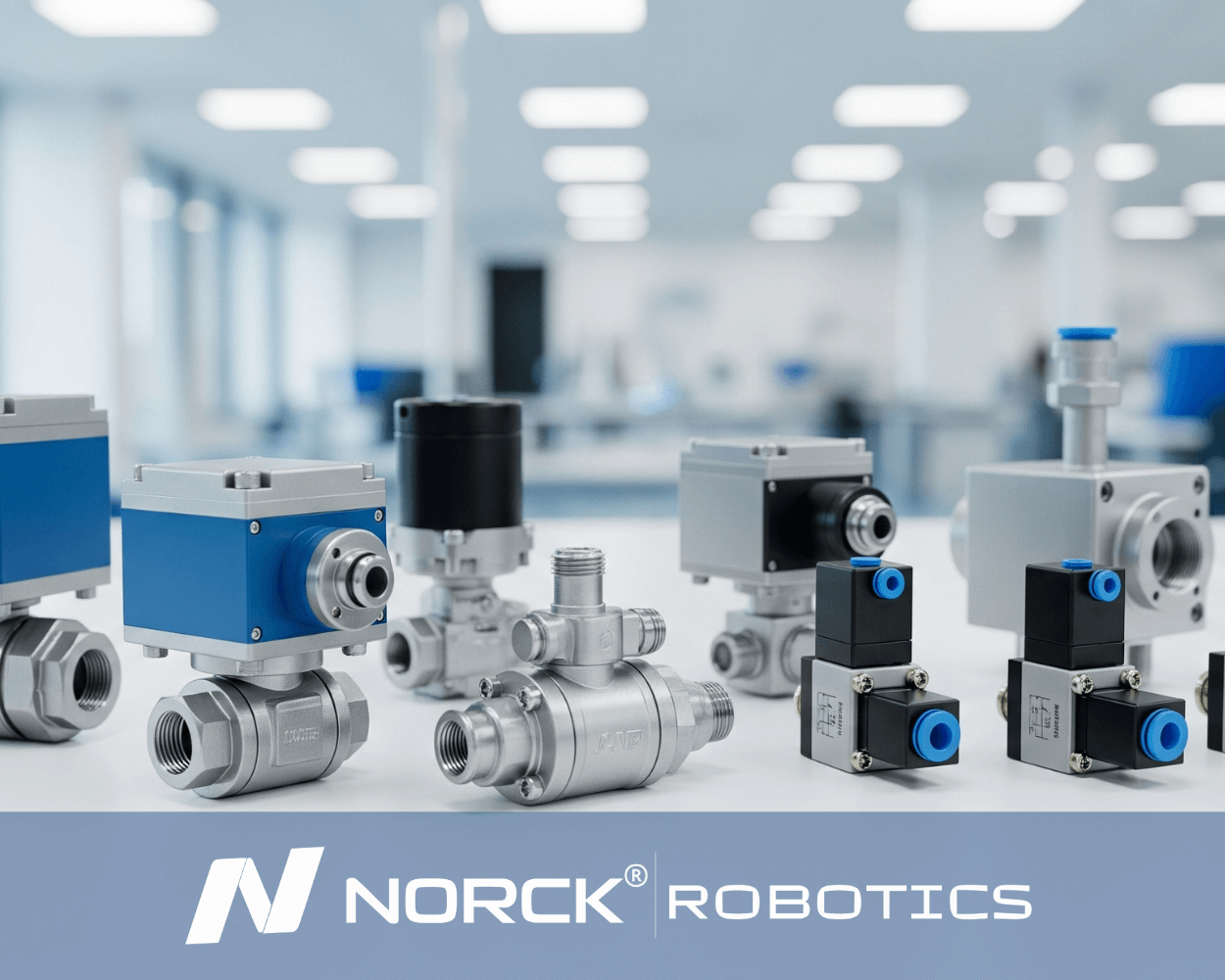
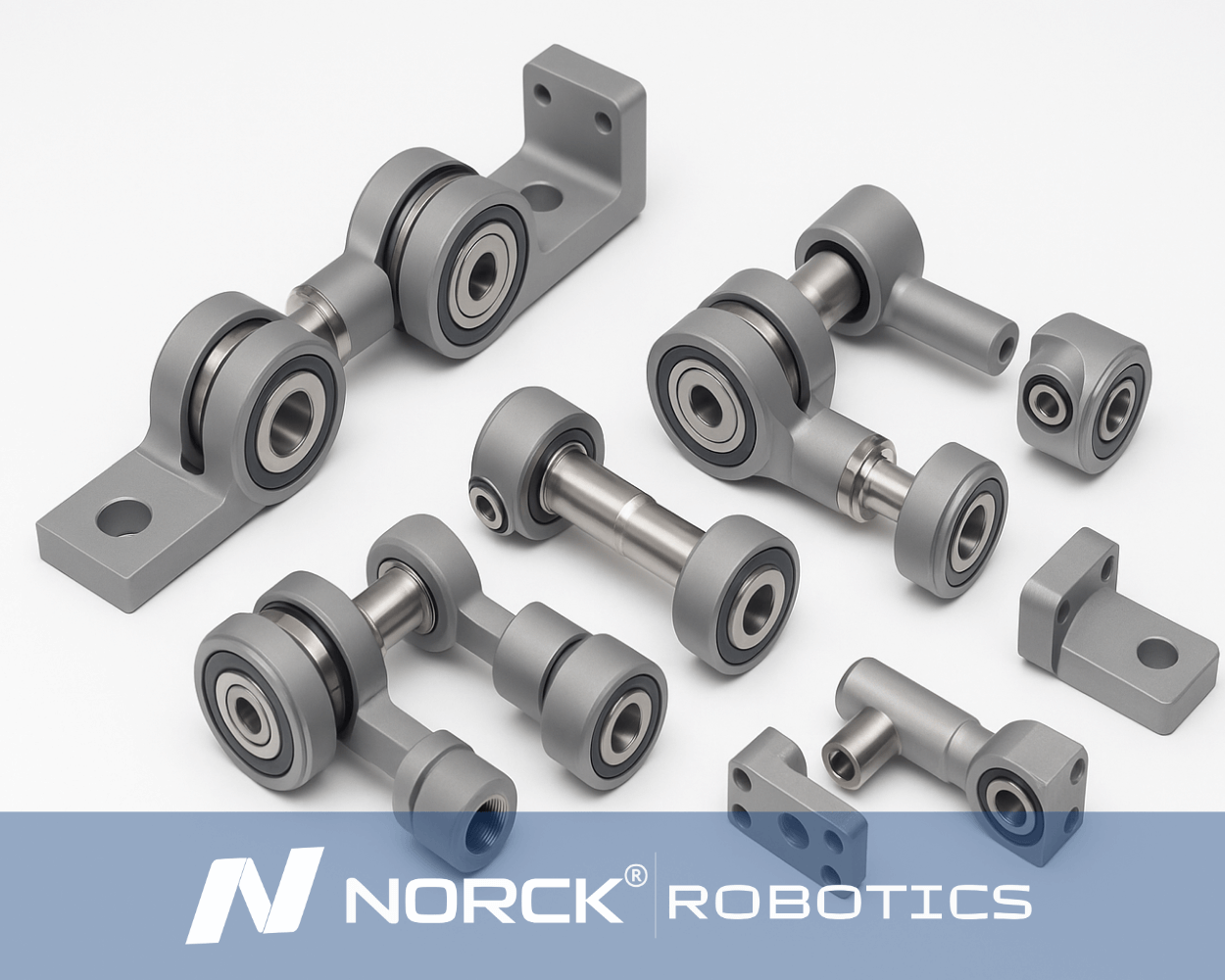
Norck Robotics specializes in providing unique robotic automation and engineering solutions designed to meet the specific operational needs of each client. Our expertise covers a wide range of industries and applications.
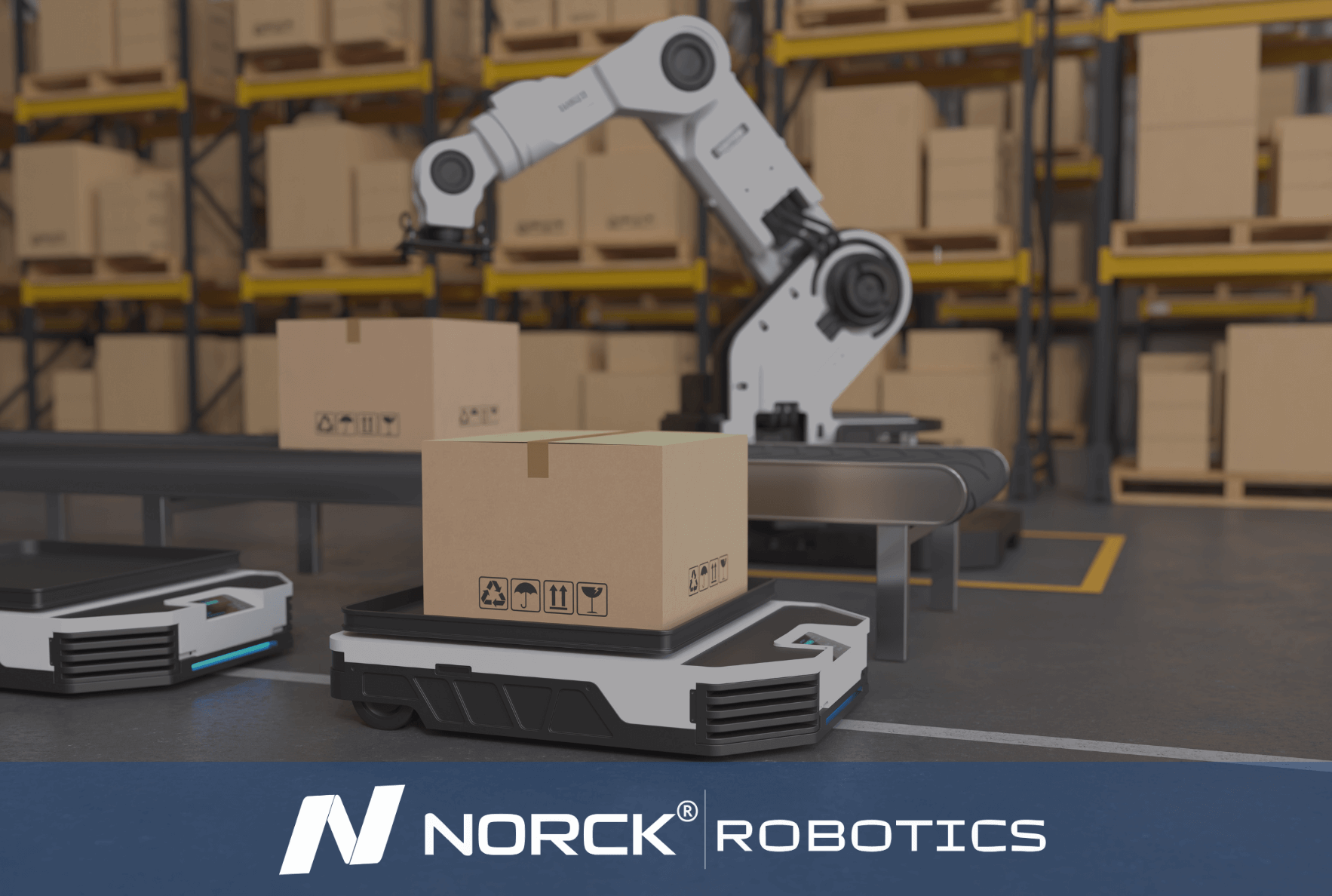
Norck Robotics delivers turnkey robotic automation and engineering solutions tailored to your specific needs across various industries.

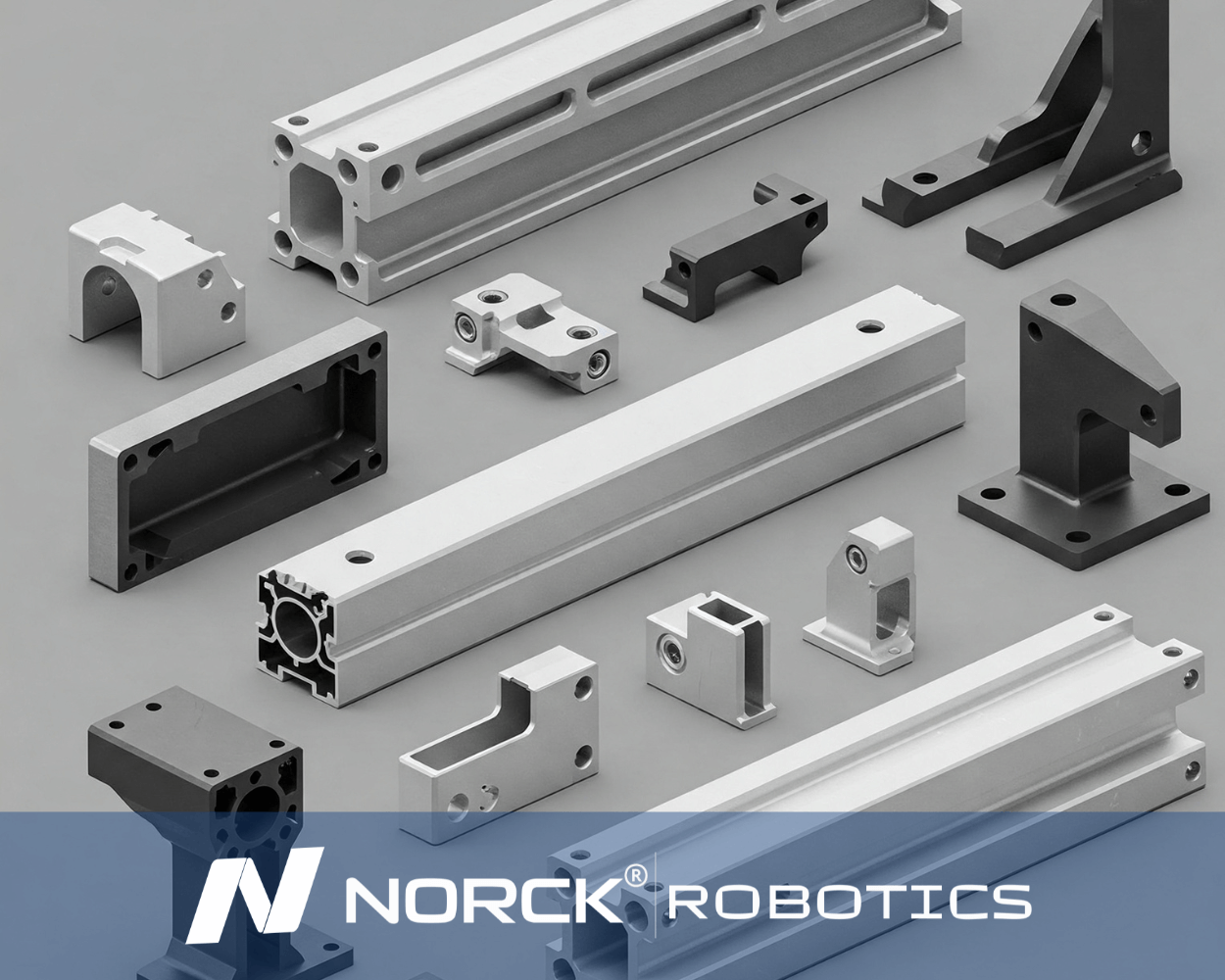
Whether you need a single robotic cell prototype or full-scale factory automation, Norck Robotics engineers are ready to collaborate with you to bring your concept to life.
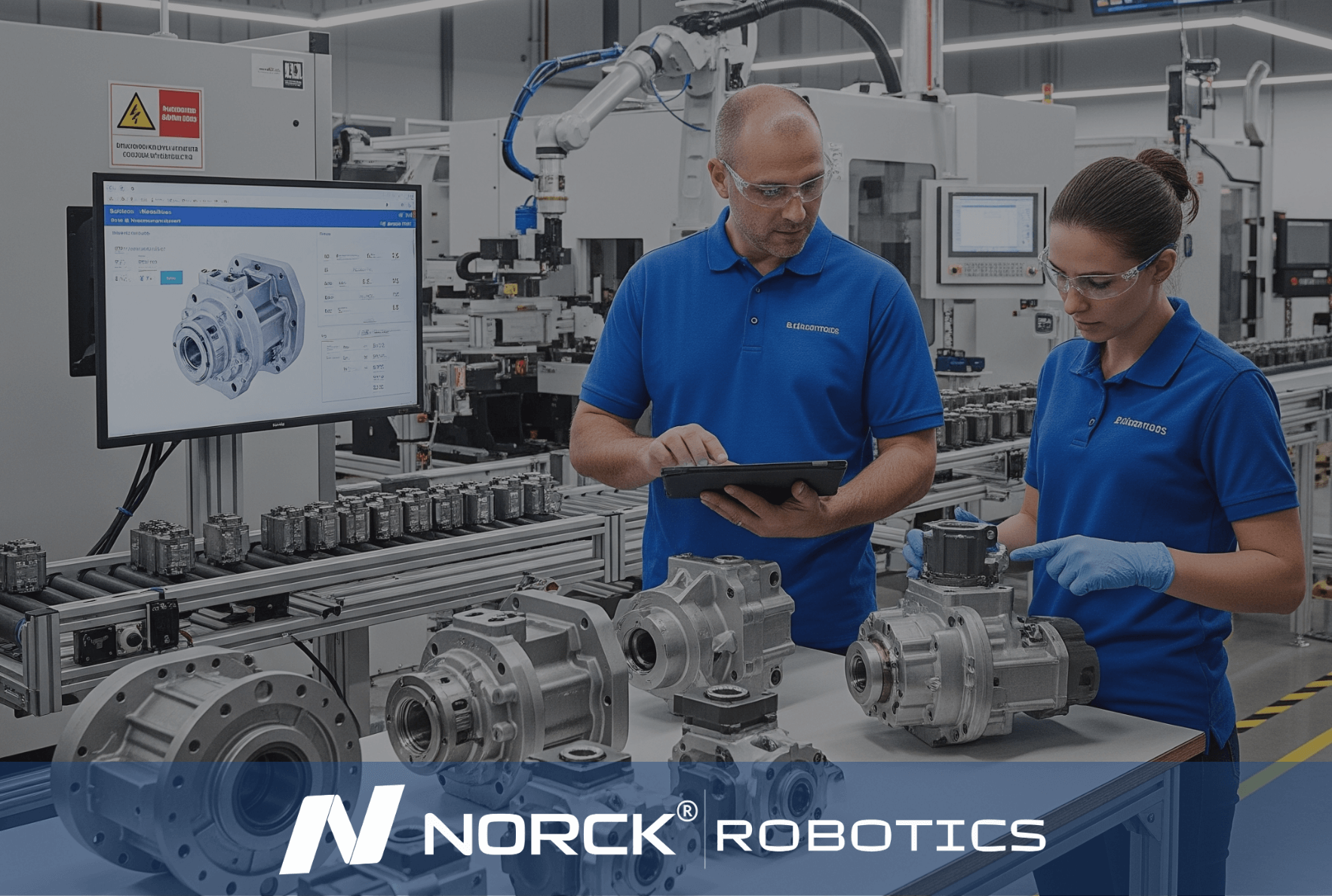
Norck Robotics engineers analyze your existing processes to provide feedback that enhances efficiency, cost-effectiveness, and productivity for robotic integration.
A PID control loop is a control algorithm used to regulate motion systems by continuously calculating the difference between a desired position (setpoint) and the actual position (feedback).
The Proportional part reacts to the present error.
The Integral accounts for past errors to eliminate offset.
The Derivative predicts future errors based on the rate of change.
The term PID stands for Proportional, Integral, and Derivative, which are three mathematical functions used to correct errors.
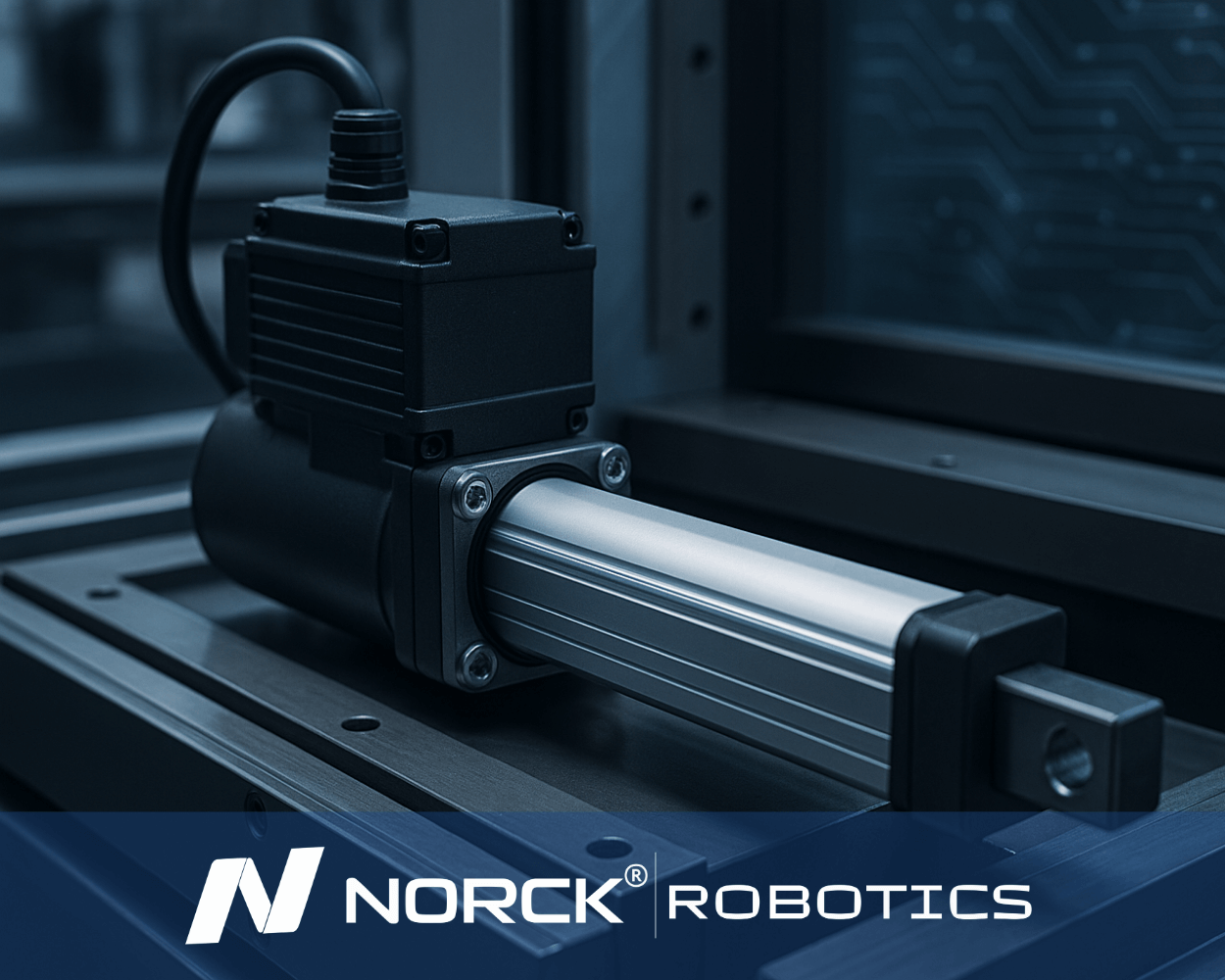
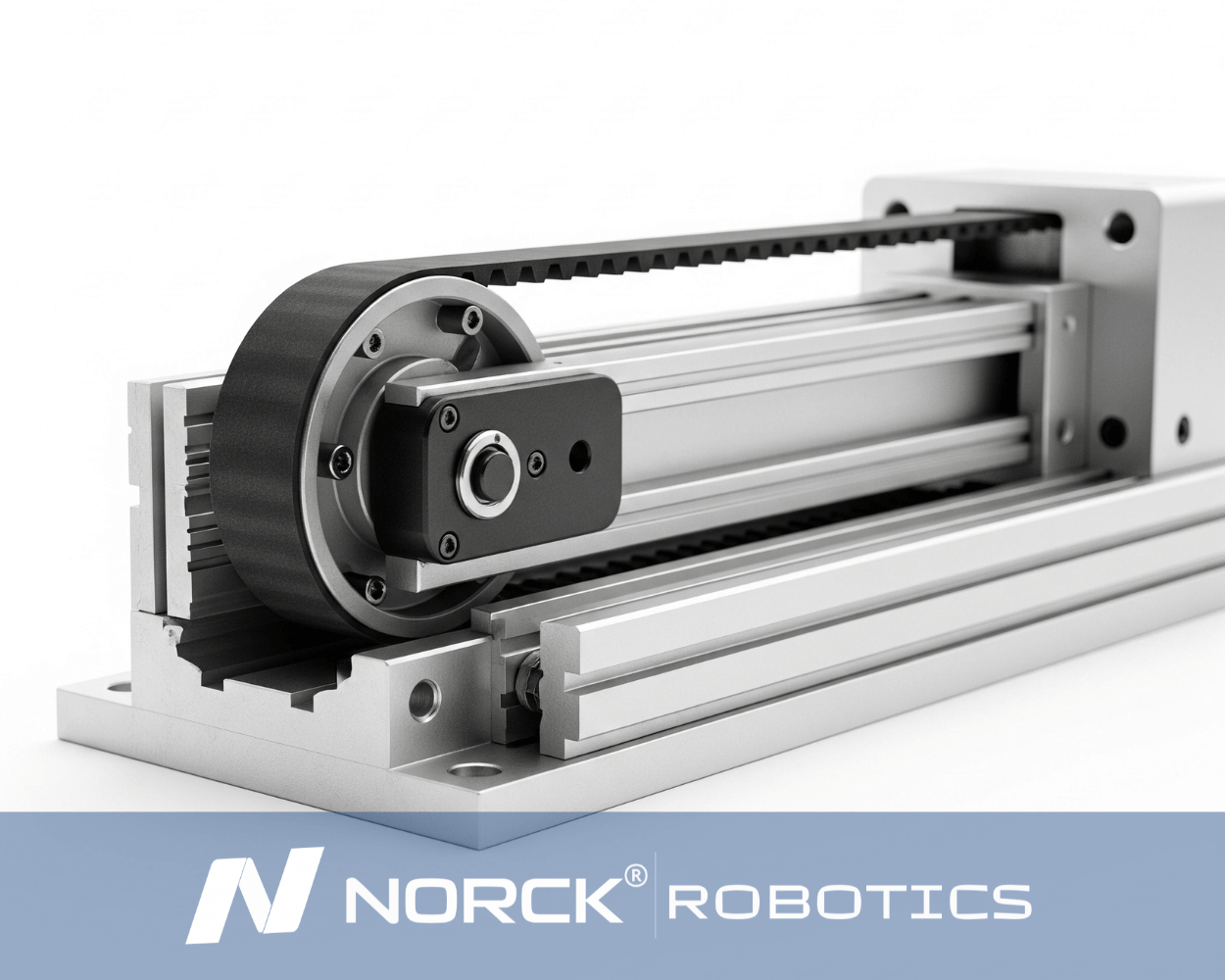
In motion control systems, especially in robotics and automation, the PID control loop is critical for achieving smooth, precise, and stable movement.
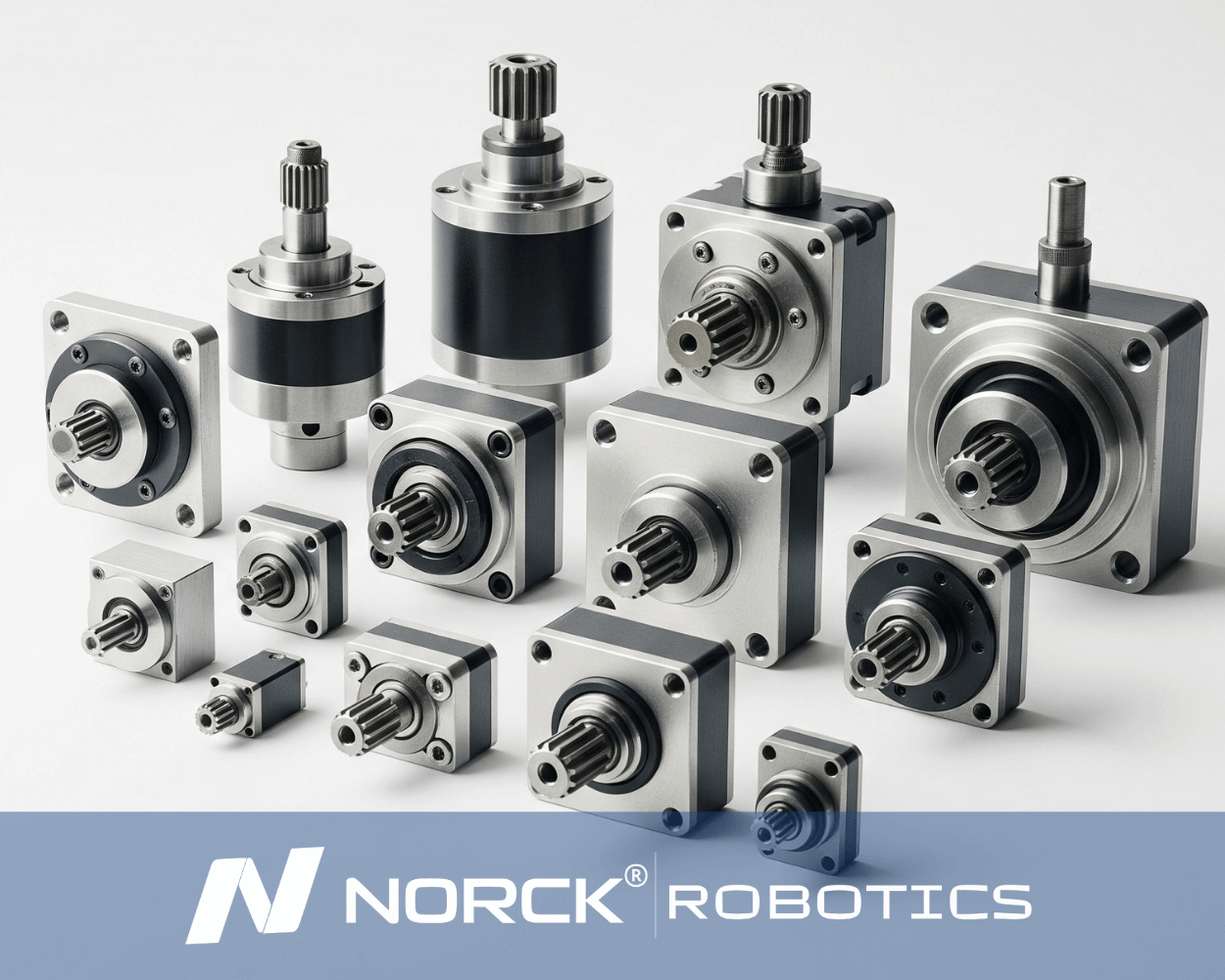
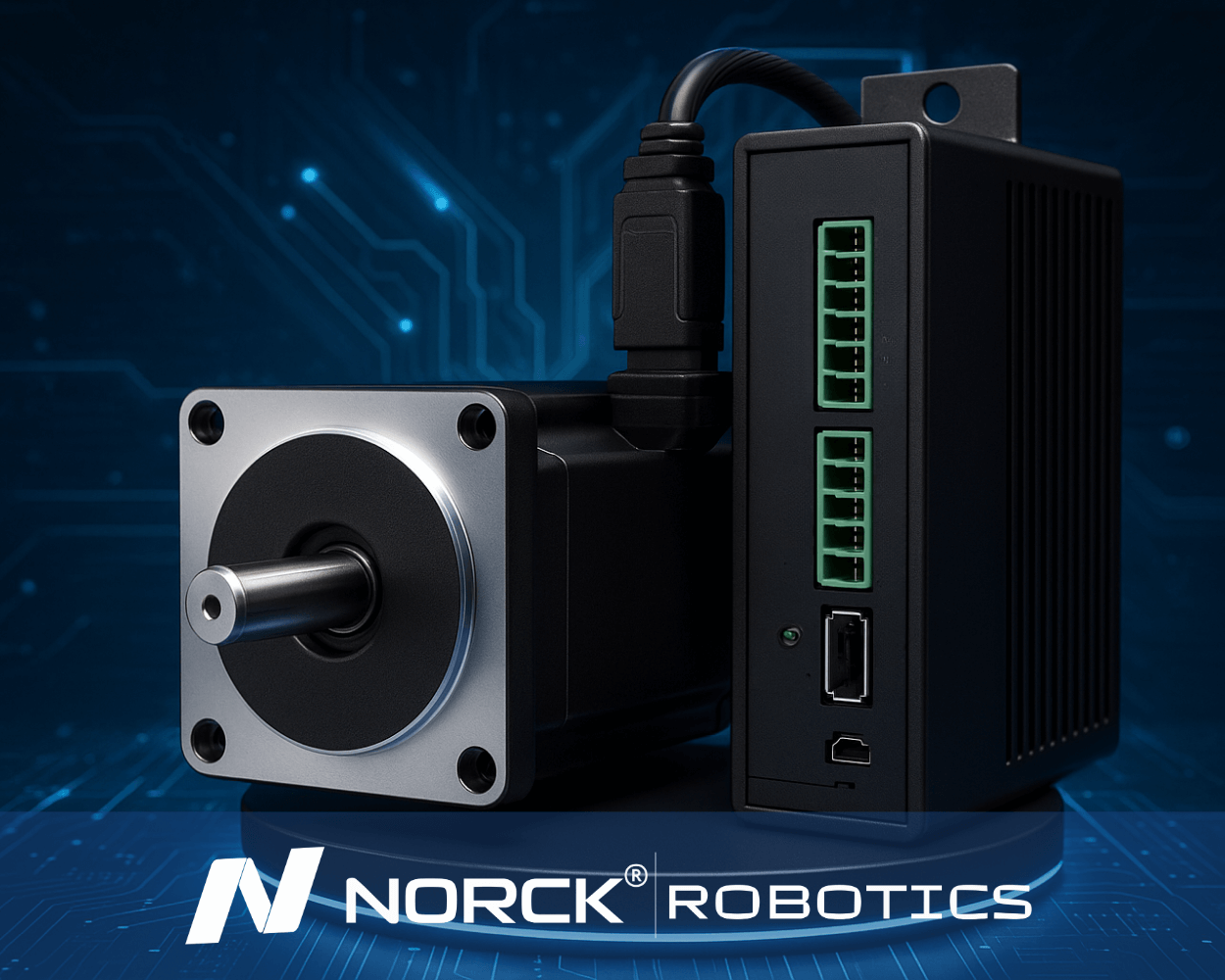
Basically, a PID-Integrated Servo Driver comes with the control algorithm embedded in its hardware. The design offers super-fast response times and much better servo motor control with no processing on an external platform.
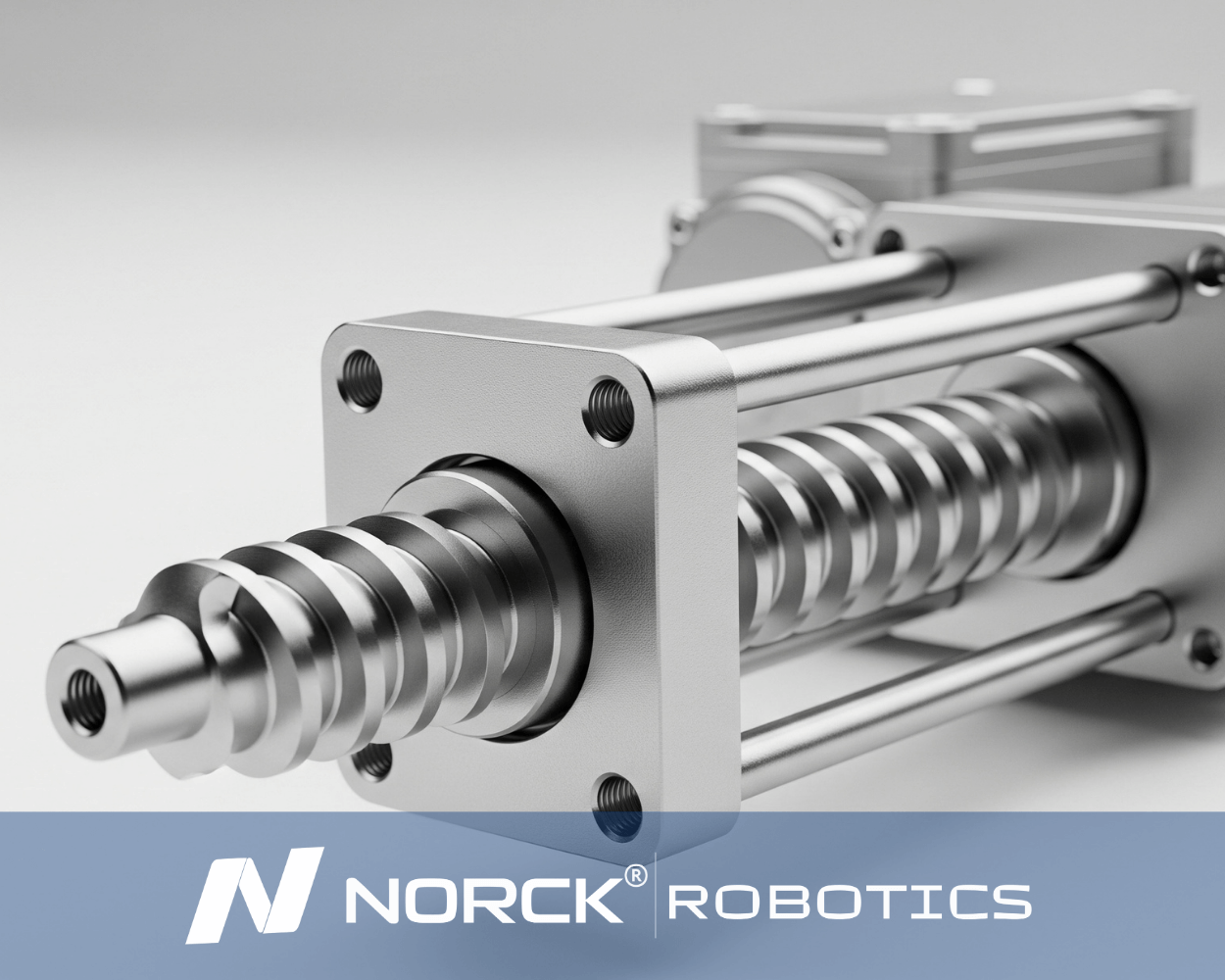
In short, the real PID-based servo drivers real-time change servo speed, torque, and position enabling applications requiring high precision and dynamic performance.
In essence, with these two systems working hand in hand, PID control and servo drivers, there is a gain in efficiency and a drop in overall complexity, which in turn highly increases reliability concerning industrial automation, CNC machinery, and robotic joints.

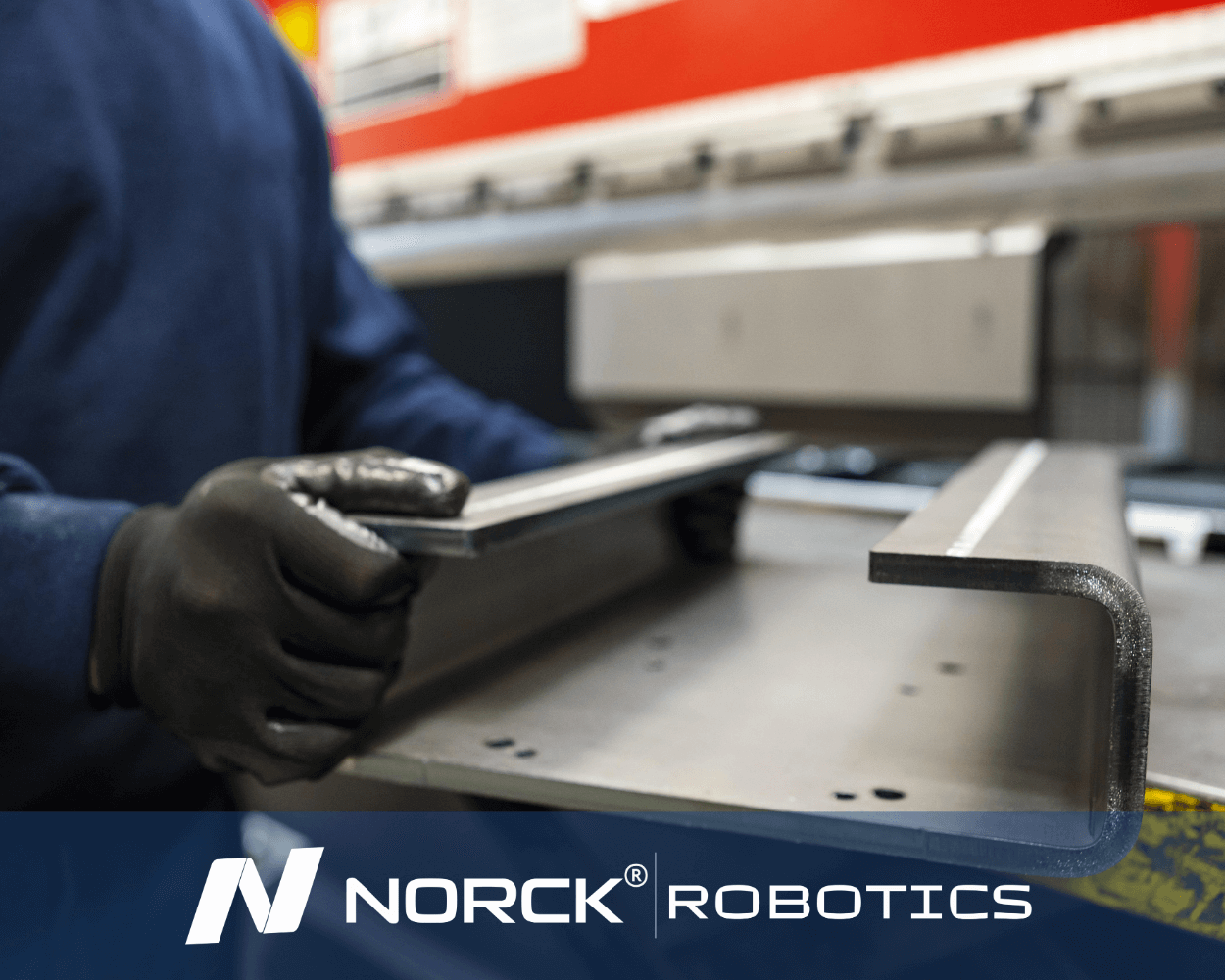
In addition to its own expert engineering team, Norck Robotics provides access to a network of hundreds of top-tier system integrators, robot manufacturers, and component suppliers across the United States, Germany, and Europe.

Working with Norck Robotics reduces dependency on manual labor, increases production consistency, and secures your operations against unforeseen disruptions, quality issues, and fluctuations. This enhances your company's supply chain resilience.
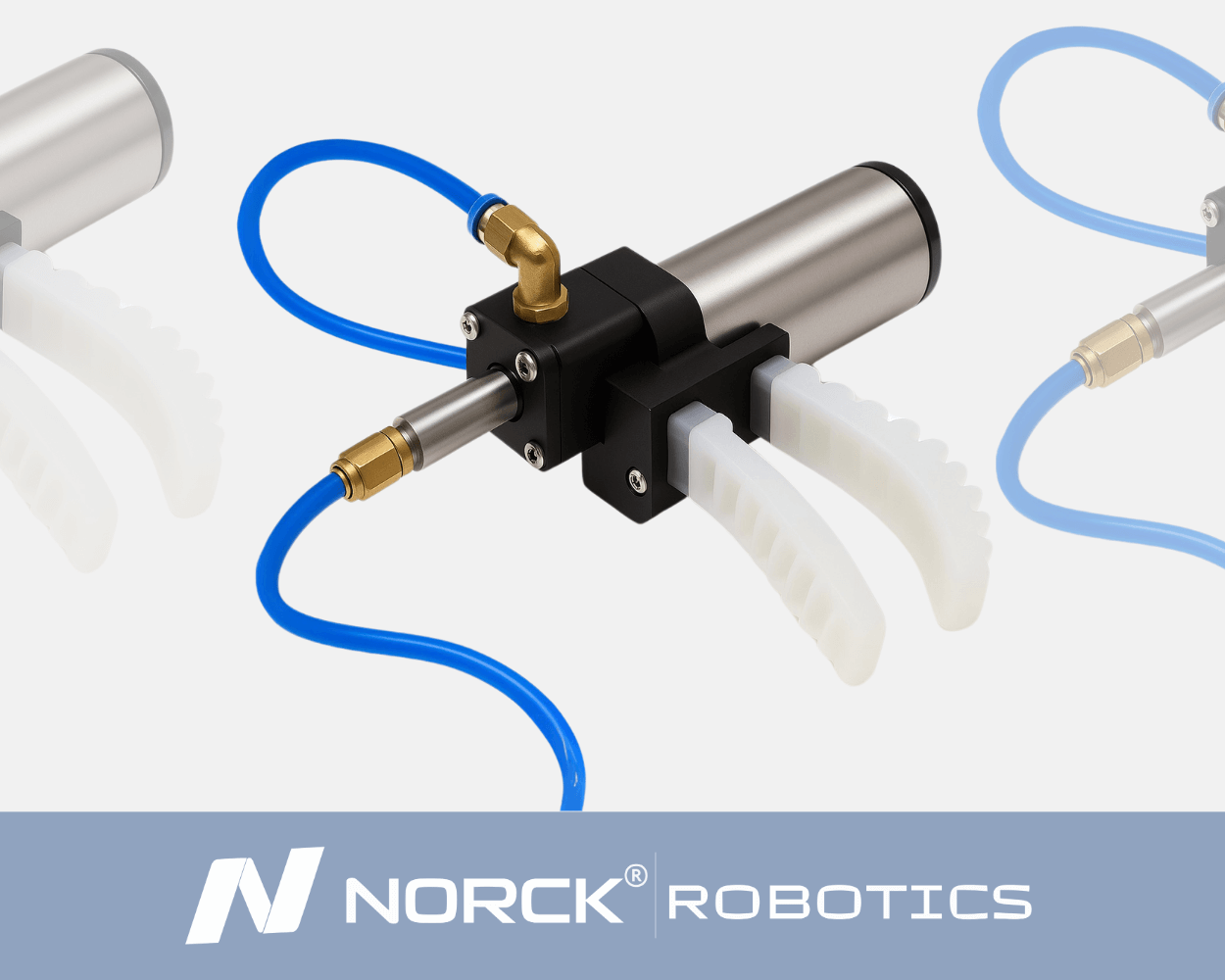
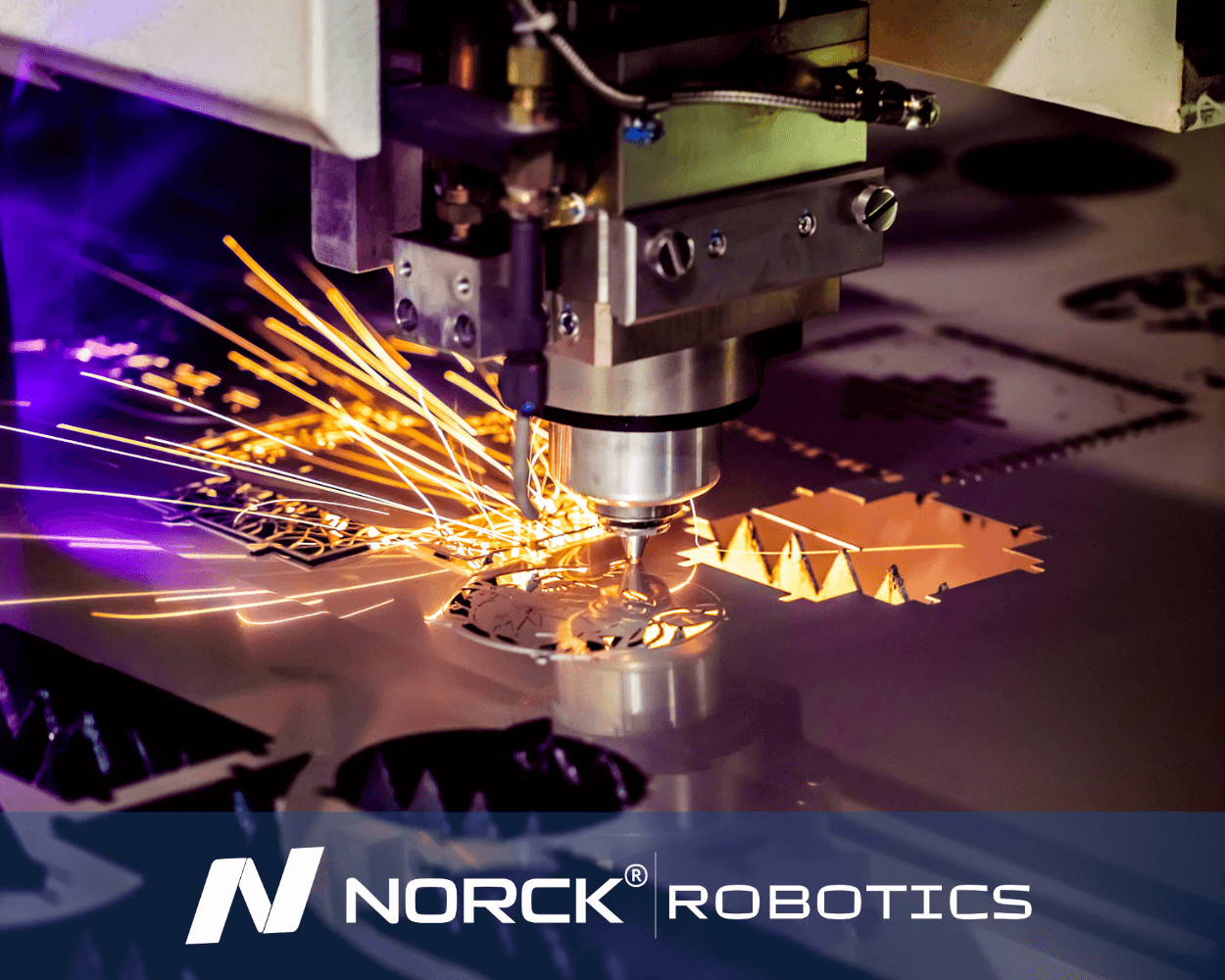
Norck Robotics advances digital automation by developing custom-designed robot grippers, advanced vision systems, and innovative simulation software. With an AI-driven, data-centric approach, it enables smarter system design, optimal performance, and predictive maintenance solutions.
Norck Robotics encourages its partners to be carbon-neutral by reducing energy consumption and material waste through the efficiency of robotic automation, and prioritizes environmentally conscious suppliers.
Closed-loop control is essential for accurate torque control since it continuously checks the system's actual performance and adjusts its output accordingly in real time to the desired setpoint.
Whatever control system is used for torque, it always measures actual torque, compares it with target value, and instantly corrects any discrepancy (error) so that stable and accurate torque delivery can be assured at the output.
Most PID-Integrated Servo Drivers keep torque constant, with slight variations, through their built-in PID algorithm, which analyzes feedback and optimally commands motor output in a fast and precise manner.
By this closed-loop method, conditions under torque or over torque that entail degraded performance or accelerated mechanical wear or would really destabilize the system are eliminated.
An open-loop system has been called a "set-and-forget" kind of system where, once the parameters are inputted, nothing else ever happens. In this case, torque changes would just be passed on to the system via speed changes.
In robotics, CNC machining, and automation, where the working environment demands high-performance characteristics, closed-loop control with a PID-Integrated Servo Driver assures synchronous torque control, higher efficiency, and system longevity.
Norck Robotics - A division of Norck Inc and Norck GmbH
All Rights Reserved. Copyright © 2025.